
Overview
结构光的本质就是双目视觉,结构光重建也完全基于双目相机的重建,也就是三角测量。而传统双目相机的重建流程,大致是:
- 相机标定:内外参(小孔相机模型)
- 极线矫正(不必须)
- 像素匹配
- 三角测量算深度
最后的三角测量是最简单的,只需要根据给定的内外参和匹配的像素点,解三角形即可。
标定和极线矫正都是比较老的算法,有大量研究花在了像素匹配这个问题上:如何知道两个相机中的某对像素,来自于同一个空间点?这必须要图像像素之间存在能够被比较匹配的差异,也就是存在特征,也就出现了各种特征的设计,比如广泛使用的SIFT等。
但是在计算深度图的时候,我希望尽量让所有的像素都能找到自己的匹配像素,那么这些特征就可能捉襟见肘了:比如,面对一面没有纹理的白墙,任何特征匹配都将失效。
没有可供匹配的特征——那我就创造特征不就行了?将一个相机换成投影仪,往场景中投影可供对比匹配的特征图案(pattern),让另一个相机拍照,然后将相机拍的照片和投影仪的特征pattern进行匹配。由于投影仪可以看做是将光路逆转过来的相机,投影仪+相机的系统完全可以看做是双目相机系统,可以在投影仪pattern和相机拍摄的图片之间做三角测量重建。
那么,问题主要就是:如何设计最容易被识别匹配成功的pattern(encoding),如何设计相应的识别算法在pattern和照片见找到对应点(decoding),然后让这些方法在复杂的现实场景中能够起效。
小孔相机模型
这个不太想写什么了,浅显易懂,主要就是几个坐标系的变换:屏幕坐标系(像素为单位) —— 成像平面坐标系(实际距离单位)——相机坐标系——世界坐标系。其中,世界坐标系-相机坐标系的变换是外参,后面的是内参。
这几个变换都是挺简单的相似三角形,不过写成矩阵形式。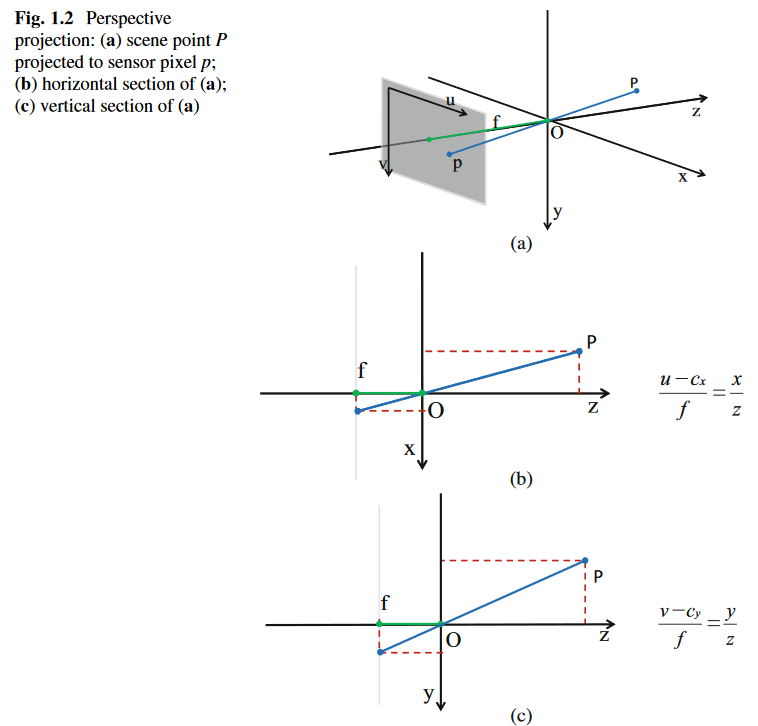
假设相机坐标系下空间点坐标(x,y,z),成像平面坐标系(u,v),则这一步投影关系可以很简单地写成矩阵形式: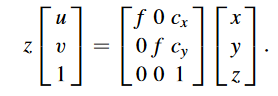
从成像平面坐标系变成像素坐标也很简单,uv乘以横纵轴像素密度(像素/单位长度)即可。
从相机坐标系变成像素坐标系的矩阵称为内参,而从世界坐标系变换为相机坐标系的矩阵称为外参,外参反应了相机的位姿。
NOTE严格来说,由于相机的各种误差,相机坐标的x,y可能不被视为垂直,所以在内参矩阵K的第一行第二列放多一个变量 。一般忽略。
假设世界坐标系下的空间点坐标 ,相机坐标系下的空间点坐标 ,两者之间的变换就是相机相对于世界坐标的旋转与平移: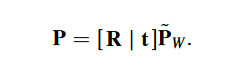
是齐次坐标。
合到一起:
是成像平面坐标系下的坐标。
总的变换矩阵 M:
求解M
求解 M 就是标定所做的事。假设已知若干对个 <像素坐标,空间点坐标>(暂且记录为)的点对数据,对于每个配对数据,可以列两个方程:
而3*4矩阵M有12个未知数,所以需要12个方程,6个点对即可。但自然一般会用很多冗余。
这样的做法叫做直接线性变换(DLT),只能“minimizes a target with algebraic significance, and is not invariant with respect to Euclidean transformations.”(没明白,但就是有缺陷),一般会拿这个结果作为初始值,然后用其它更高级点的优化目标或方法,比如用最小二乘:
KRt就是内外参,也就是M。
相机畸变
光学系统的畸变情况很多,算法中一般不考虑太多,直接当做是distortion :它把原本应该位于 (u, v) 的像素,ditort到另一个位置 (u’,v’)。
一般直接用多项式去拟合这个变换:
畸变参数 。
因此,要标定的参数集合变成了
相机标定
就是拟合上面的参数集合 。没看具体怎么做。
极线矫正
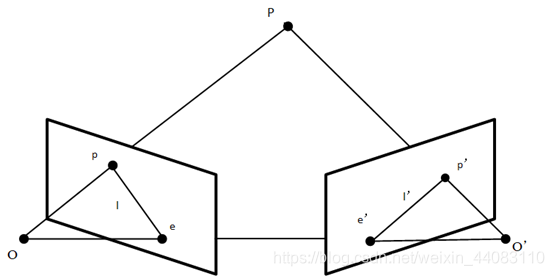
当两个相机对齐(rectified)的时候,有一个很好的几何性质:
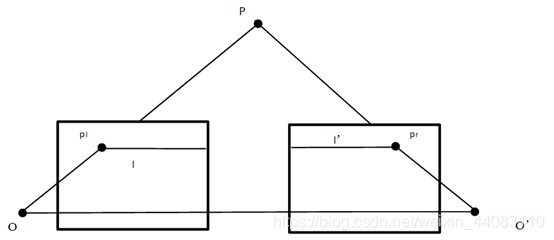
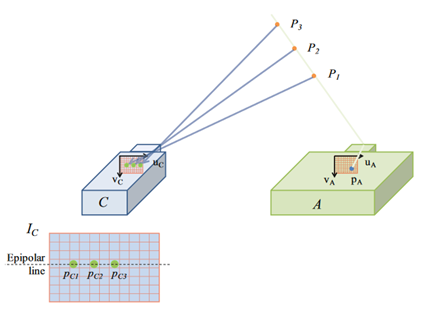
将相机A的小孔、虚线面上的像素和相机B的小孔形成的三角形的平面扩展,会交两个虚像面于两条平行线,这个像素所可能的对应点就在对方虚线面的这条线上。对于对齐的两个相机来说,就是一个像素在另一个相机上的对应点,一定于它水平(在同一行)。因此,这就把匹配点从二维搜索降到了一维搜索。
若是没有对齐,这个结论页成立,不过不是水平线而是斜线了,这和相机之间的相对位姿有关。
结构光系统同样也适用这一点,一般会让投影仪和相机对齐,这样只用在水平线上进行匹配搜索,让投影仪的pattern只用在水平方向上有区别即可。
具体怎么极线矫正(其实是对齐rectify),我没看()。
关键点匹配
没看。双目视觉中的关键点匹配可以很复杂,但结构光因为人为投影pattern,匹配方法一般比较简单。
简单:比如,就是遍历可能的像素去计算相似度,选最大相似度的,而这个相似度一般也非常简单,譬如在相邻像素组成的窗口内逐像素求差求平均(当然,比较古老)…
结构光投影Pattern的设计
结构光是为了给不易匹配的场景投影加上易匹配的pattern,核心问题之一就是如何设计pattern。一般来说,pattern的设计有四种自由度:wavelength (channel), range (pixel level), temporal, spatial。
衡量pattern的方法就是要uniqueness,一种方便的可视化是让pattern的列之间两两计算相似度形成相似度矩阵。一种比较理论的方法是,在实际使用的时候,让实际照片和pattern匹配的同时,找到相似度次大的那个code与这个像素的相似度(因为匹配的时候会匹配到相似度最大的那个code),如果这个次大的相似度与最大相似度差别大,uniqueness就强。
directed pattern
直接的结构光pattern就是最直接的pattern:给每个像素赋予不同的颜色或灰度值。但是这会显著地受环境和设备因素影响,很不稳定,一般不单独使用。
temporal pattern
这是最准的方法。如下图所示,依次投影K个pattern,这样每个像素在K各pattern上接受到的灰度值(或颜色值)形成了一个长度为 K 的数组,temporal pattern 让同一行的各个像素的这个特征数组各不相同。
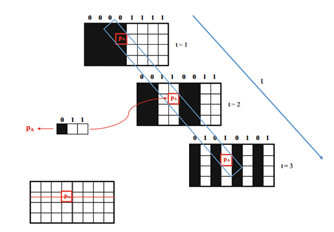
我们将一行中每个像素在K patterns中收到的特征数组排列成矩阵,就形成了编码code。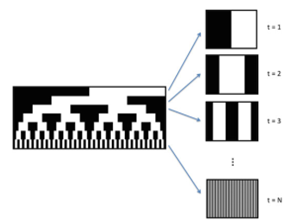
比如这个图就是7个Pattern形成的。每一行提出来,上下填充repeat,就能形成7个pattern。
基于格雷编码
基于格雷码的方法是最经典的0-1 temporal pattern的设计,让最终的code matrix的每列之间构成格雷码。
Phase shift sin/cos
通过不断堆砌pattern的数量,结构光可以达到非常高的精度(比如,每个patter只让所有列中的一列为白,其它全黑,然后投影width个这样的pattern)。
用 正弦函数+相位偏移 也可以做类似的事,用正弦或余弦函数来形成每列的code,一般有这几个控制条件:正弦函数的周期数(频率)和相位偏移数量,最后形成 n_freq * n_phase_shifts 个pattern。
每个pattern的公式为:
其中,是标准化函数,将结果缩放到[0,1],f是频率,是相位偏移(指定n次相位偏移,每次偏移相位),常数P和变量 f 决定了在同情况下的相位的步进,可以设为1。
下面的代码展示了频率1~16,相位偏移10次形成的patterns(一共160个)。
import numpy as np
import matplotlib.pyplot as plt
# 图案参数
width = 800 # 图像宽度
height = 600 # 图像高度
frequencies = np.arange(1, 17) # 频率从1到16
phase_shifts = np.linspace(0, 2 * np.pi, 10, endpoint=False) # 10次相位移动
# 生成图案
patterns = []
for freq in frequencies:
for phase in phase_shifts:
x = np.linspace(0, 2 * np.pi * freq, width)
y = (1 + np.cos(x + phase)) / 2 # 正弦波图案
pattern = np.tile(y, (height, 1)) # 重复图案
patterns.append(pattern)
# 显示图案示例
fig, axes = plt.subplots(16, 10, figsize=(20, 32))
for i in range(16):
for j in range(10):
axes[i, j].imshow(patterns[i * 10 + j], cmap='gray')
axes[i, j].axis('off')
plt.show() 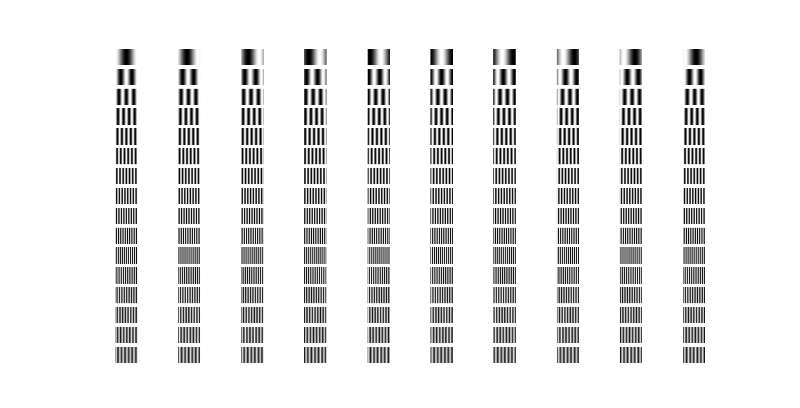
Spatial pattern
temporal patterns可以达到很高的精度,但速度较慢。Spatial pattern试图只用一个pattern。直接pattern尝试直接让每个像素都不同的做法不太可靠,但让某个固定大小的滑动窗口内的像素群unique是很有可能,也更为鲁棒的。spatial pattern做的就是这个:让一个固定大小的滑动窗口内的pattern独立。
大部分消费级实时深度相机都是用 spatial pattern。
将Pattern可能用到的值视作一个字符集,只考虑极线,一行pattern像素就是一个字符串,spatial pattern的任务就是让这个字符串的任意长度为 t 的子串互不相同。
有多种方法做到这一点,比较有代表性的就是 de brujin 图。这个图的介绍建议看维基百科。首先,给定一个字符集B以及字符串长度 t,这个字符集可以排列出 种互不相同的长度为t的字符串,这些字符串就是 de brujin 图的顶点。图的边这样形成:如果字符串 a 可以用字符串b 通过这种方式构造:将 b 的各个元素向左移动一位(最左边的丢弃),然后在最右侧补充一个字符,那么就构建边 <b, a> (b->a.)。这个图有很多条回路(定量忘了),并且每个回路都是哈密顿回路,而且每个回路的节点(长度为t的字符串)互不相同,并且相邻节点的字符串能够首尾拼接。顺着这些回路走完一圈,就能形成满足前面条件的 pattern 的一行。
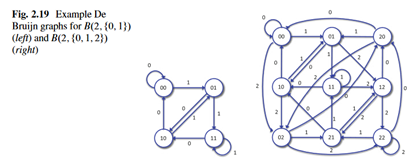
可见,B就是所有可能采用的像素值的几何(比如0-1),而 t 就是所设定的滑动窗口的大小。
由于 de brujin 图有很多个哈密顿回路,所以用它形成的spatial pattern可以让每行之间都不一样,从而不再强烈地要求极线矫正。
当然,spatial pattern还有其他很多设计。