
PleOctree
Overview
PlenOctrees for Real-time Rendering of Neural Radiance Fields
PlenOctree的工作很简单:建立了一种能高速实时渲染NeRF训练结果的方法。其实本质上就是把NeRF的隐式建模拆解 为显式的,变成一个3D体素Grid,然后把这个Grid化简为八叉树表示(本质上是尽可能排除空的体素),最后在八叉树上直接进行Fine-Tune。
这样实际上是退化为了传统的体素渲染方法,有了完整的八叉树表示的体素Grid,对每个光线做碰撞检测找到涉及的体素,运用NeRF渲染方程即可。
快在于:渲染的时候不需要像NeRF那样多重采样(因为所有体素已经提前定死了),并且不需要走神经网络来获取每个体素的 rgb and 。
相较于NeRF的变化
NeRF-SH
本文采用的是NeRF-SH。这个变动是对NeRF需要输入视线到神经网络获取视线相关的rgb的改进。NeRF-SH中每个体素的颜色用二阶球谐系数(9*3=27个)。这样只用输入体素位置、获得SH即可,神经网络直接输出SH,不需要视线。
关于球谐函数SH,见同一目录下的《球谐系数与环境光照》的前半部分。简单来说,球谐函数是一组基函数,输入球坐标下的方向能得到每个基函数的值(每阶基函数本身长什么样可以查表),然后以球谐系数为权值求和即可得颜色值。三通道三组球谐系数。
最后算得的rgb用Sigmoid函数标准化。
已经训练好的NeRF可以用来估计每个体素的SH。对每个体素,用随机的视线方向,由训练好的NeRF计算rgb,知结果rgb,知球谐函数值(用视线方向去算),最后应该是个线性方程组,方程数量由视线方向数量决定。如果忽略 Sigmoid,应该可以直接最小二乘。如果有 Sigmoid,用极大似然可能可以估计。
Sparsity Prior Loss
普通的NeRF在照片看不到的地方可能生成任何结果,这对于结果质量影响不大,但会影响八叉树表示的结果,也会把八叉树的Grid“冲稀”。如下图所示: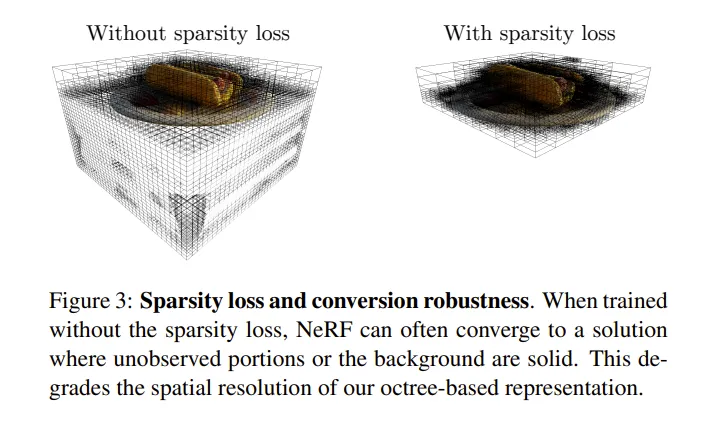
本文提出了Sparsity Prior Loss,对较大的sigma做出惩罚。
其中 是超参数。这个损失函数会让整体的sigma 有减小的倾向。对于有用的体素,渲染方程补正了这一倾向;而空体素不会,更倾向于很小的数,归0.
Method
NeRF-SH转化为八叉树
就是提前计算出所有体素的结果,滤掉那些空的、贡献度小的。
- Evaluation 用一个均匀的密集3D体素 Grid,对每个Grid上的点(体素)在NeRF中取出 sigma。首先,如果sigma直接小于某个阈值1的,直接舍弃(归0)。
- Filtering 对所有训练用图像上的所有射线,计算每个体素的 alpha map,即每个射线上体素的 ,每个体素,用所有射线得到的最大的结果作为标志。滤掉这个标志小于一个阈值2的体素。
(注意,这里就是),文中少了Ti,是笔误. - Sampling 对留下的体素取 SH。做法是在每个体素范围内抽样256个点,丢入 NeRF-SH 算SH,求均值。
抽样8个点能加速10倍,质量下降较少。 这个八叉树“不谋而合” - 成树。所谓形成八叉树,只是尽可能把全部舍弃掉的体素合并为大叶子。而上面过程中保留的一并是叶子,不再合并。这样渲染的时候可以快速跳过无意义的体素。
PlenOctree Optimization
NeRF的渲染方程是可微的。可以直接优化转换完的 Octree 上每个叶子的 sigma and sh。
使用 MSEloss + SGD。
Limitations
空间需求大。几GB,最大压缩也有一百MB+。
不能unbounded scene(不能处理background等),不能 6DOF 漫游。(为何不能?)
这里的Real forward facing , real 360 都不一样,有什么区别?
Plenoxel
Overview
Plenoxels: Radiance Fields without Neural Networks
Plenoxels 的贡献是在NeRFs中,彻底丢弃了神经网络,直接在voxel grid 上优化 SH-coef and sigma。同时比NeRF加速100倍(训练加速100倍,渲染类似PlenOctree也很快),没有目视质量损失。同时将方法扩展到了unbounded开放场景,也就是可以一定程度上处理背景前景。
该方法证明了NeRF的真正核心是可微渲染,而非神经网络,所以简单的MLP就能解决问题——其实根本不是MLP的威力。
该方法一定程度上承接自 PlenOctree,是同一个团队搞得,这个显然牛很多。
场景表示
类似上面的 Octree,不过这里没有强套 Octree 的概念。
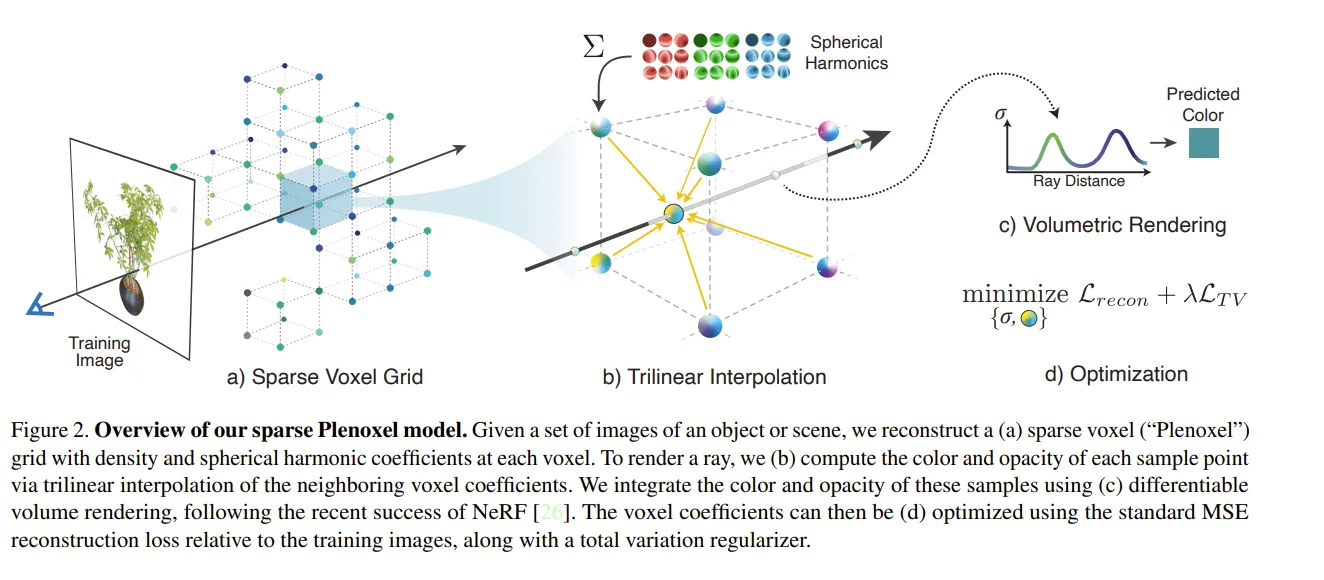
一个密集的 3D Grid,每个角点有 opacity 和 rgb 27个SH-coef。直接优化这所有角点上的 sigam and SH-coef。
对于空间中任意一点,它用于渲染的 sh-coef和sigma就是从它所属于的体素的8个角点 三线性插值 而来的。
优化
Sparse:Corse to Fine
这里同样用了由粗到细+稀疏网格的方法。首先Corse,在较低分辨率(比如256^3^)上对所有角点的参数优化;到一定程度后(文章显示1~2分钟后,就只有不到 10% 的点的sigma不是0了),删去没用的、sigma很小的 体素(大抵是用角点判断,怎么用角点的opacity删立方体,具体怎么做我也没看源码。许是删角点-删去与它相接的边?),然后,剩下的体素就成了稀疏体素Grid。之后 Fine,把剩下的体素一分为八(每个边中间切开,切完后新角点的参数盲猜线性插值),接着优化出最终结果。
这里删点的方法和 PlenOctree 相同。也是先直接删掉本来就很小的,再删掉所有训练图像的视线中最大的 T(1-exp(-sigma delta)) 小于某个阈值的点。
同时,文中表示一个角点会对其周围点的插值产生影响,不能删的太随意。只有它邻居点也应该删的时候才能删。具体怎样,恐怕得看源码。。
损失函数
首先,对于每个渲染出来的图片,使用均方差损失,记得用射线数量做平均。
然后,还使用了 variation regularization (TV) 损失函数来促使更平滑的结果。
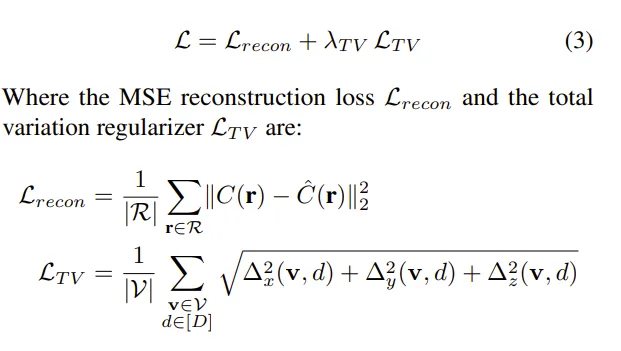
其中,R是训练图片涉及的所有射线集合,V是Grid中所有体素集合,D为1~9,表示第几个球谐系数(每个rgb三通道)。而表示体素 v(i,j,k) 的第d个球谐系数和体素 v’(i+1, j, k)的第d个球谐系数的平方差,y,z同理,记得索引 +1 的位置也跟着改变。
直观上来看,确实会导致比较平滑的结果,毕竟是在相邻体素SH作差。
文章的三线性插值使可以在任意空间点得到参数,但似乎仍旧用了和 PlenOctree类似的方法光线投射渲染(而不是在光线上任意选点),其实也可以是任意选点,在每个体素内可以随便选一个点,毕竟有了Corse步骤后,每个体素已经代表了NeRF的第一层抽样(滤去了无用的体素)。
计算MSE的时候,随机抽选一些射线,计算TV的时候,随机抽取一些体素来算。MSE需要渲染出一个结果,TV却不需要,直接随便选就行了,这两者是独立、分开的。
两者的优化用同样的learning rate,但独立分辨更新lr,也是因为两者计算过程本就相对独立。
最后,还从最优化算法上谈了谈我看不懂的东西。说这个优化任务:优化量大、纬度高、病态问题,推荐的解决办法是 second-order algorithm,但是无法实现。文章用了 RMSProp 算法,这也是一种梯度下降优化器,改进自Adagrad。
文章表示,自己方法不受目前的 autodiff 支持,所以实现了自定义CUDA算子。应该是TV的反向传播比较奇怪。
Unbounded
what is multisphere image background and its grid? 把场景扩展到 Unbounded 上去,可以合成背景、前景。
文中说用 multisphere image background model,和NeRF++类似。每一个背景图层也有自己的 opacity, rgb(但是好像不记SH-Coef?是类似天空盒了吗)。文章说每个MSI图层也有自己的 Grid,和前面一样,并且里面的参数也是用类似的过程学出来的。这个grid用等距柱面投影投成了球形(地图制法)。
我不懂这个 grid 是什么意思。但是不同图层之间有类似的 opacity 积累应是和体素渲染原理差不多?
似乎是multiplane的路子。
可能 NeRF++的论文里说的比较清楚?
不同的 Regularization
文章推荐对不同的任务 Synthetic scene, Real Forward-Facing Scene, Real 360° scene 用不同的regularization.
这三者,除了第一个是来自电脑建模生成的数据集,后面两个有什么区别? 对于 第一个,用TV。
对于第二个,用 lambda_TV更大的TV(Result一节中简单讲到的实现),或者用基于柯西损失的sparsity prior:
其中 是射线 r 上的第k个体素的sigma.
对于第三个,用
尽可能使前景背景不透明度要么0要么1。(损失函数中间大两头小)。
Limitations
artifacts. 我不知道怎么翻译这个,是某种效果不行(比如架子鼓反光不行等)。所有病态逆问题的通病。
引入了一些超参数。没有理论上的最好,得调。
可以引入正确的反走样方法以 scale。
用分层数据结构加速。