
人体的隐式建模 Neural Body.
Neural Body: Implicit Neural Representations with Structured Latent Codes for Novel View Synthesis of Dynamic Humans
项目源码不太容易看,挺绕。。
任务目标
最直接的目的是,NeRF需要采集大量不同视角的对场景的照片,希望减少相机视角数量,用图片完成隐式建模,并取得好结果。
显然,这个问题是更加病态的,所以不会直接对场景进行渲染,而是对人体进行渲染。对于机器而言,人体本身已经有大量的“先验“的知识,比如SMPL,人体大致形状结构等,有机会用更少的角度完成人体的隐式建模任务。
不需要一些东西,就会需要一些其它东西
既然不需要那么多角度的相机,就会需要一些其它东西。这里主要是一些人体的先验知识,以及使用视频来获取更多的帧数等。
SMPL模型
A skinned multi person linear model. ACM TOG, 2015
SMPL模型是人体参数化模型,有几十个参数,训练这些参数可以得到大部分体型和动作的人体模型,这个模型已经包含了人体的拓扑形态、关节链接等“知识”。通过训练这些模型,使之摆出和照片相似的动作和体型(pose , shape )。体型参数有10个,每个都有其大致意义,姿态参数有24*3个,为24个关节节点,每个子骨骼相对于父的轴向旋转。
neural body首先将SMPL模型根据多角度图片进行训练,得到一个相近的人体和姿态,这已有现成的方法,文中用的是 A 3d deformation model for tracking faces, hands, and bodies. CVPR, 2018。这个方法应该是是更进一步,提出了能表现衣服、头发、具体手势表情等的模型(当然也是基于SMPL。。)。
视频
不同于NERF每个角度的相机只需要一张照片,neural body每个相机需要一个视频。视频中每个帧都是一个用来训练的图片,因而可以积累到但角度比较多的图片。而由于人在视频中会动,这些帧也能为训练提供更多信息。
此外,用统一结构化潜码应用到所有不同姿态上,为训练单一模型、适应不同姿态,形成动态人体提供了基础。即需要将这个结构化潜码用在不同姿态的SMPL人体上都能有效。
方法
流程
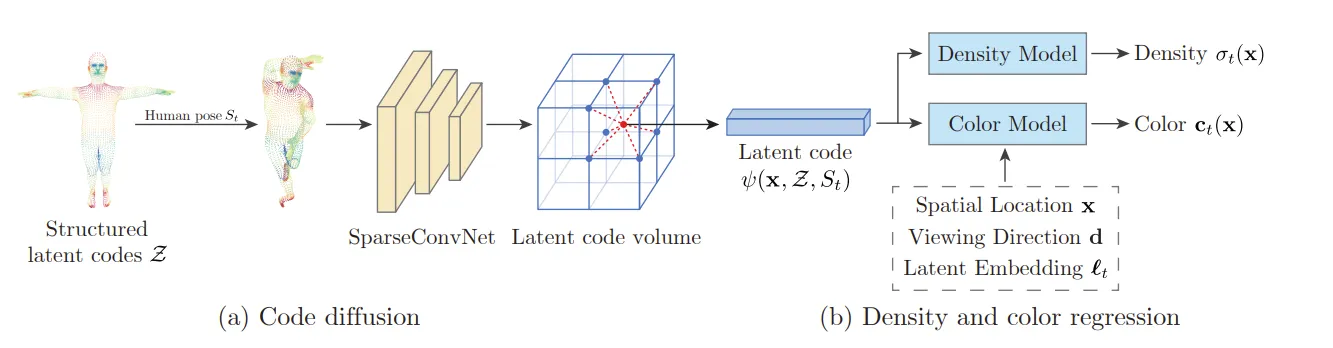
1、首先,用现有方法,根据每帧 t 多角度图片,优化出适合该帧pose的SMPL参数 。从这个参数得到SMPL 6980个顶点每个顶点的坐标。为这些坐标用 embedding 赋予一个长度为16的潜码。
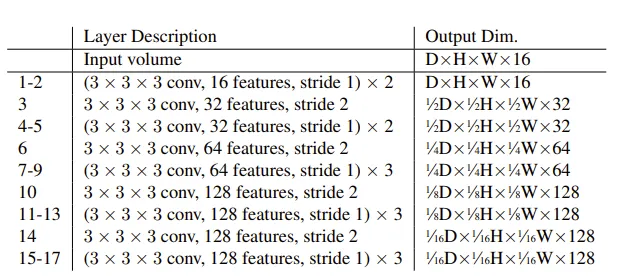
2、将空间离散化为体素,这样有的体素有潜码(之前6980个顶点对应的体素),大部分的全0. 用 SparseConvNet 稀疏卷积(3D卷积)进行扩散(diffusion),将每个顶点的潜码扩散到周围去。后续,如果需要对某一个特定的空间点取潜码,则在此点所属的体素内,用该体素与周围体素的潜码的 trilinear interpolation 得到该点的潜码。任意空间点在第t帧的动作下的潜码用 表示。
3、接下来计算视线上每个体素的rgb和体素密度。
- 体素密度。这个网络是两层的全连接层,直接以该体素的结构化潜码为输入。
- rgb。这是一个四层的全连接层网络。应该每一层都加入了新东西(也可能是在一开始就把所有拼接在了一起)(但考虑到NeRF的处理,我倾向于一层层加入)(看看源码,但是源码有亿点绕,不好看),依次加入 该点结构化潜码、视线方向单位向量傅里叶空间编码后的结果(同NeRF)、该点xyz位置空间编码后的结果、该帧 ( t ) 做了embedding后的向量(nn.Embedding(Nt, 128))。
4、得到每个点的rgb和体素密度,用NeRF一样的渲染方程渲染。或者用体素密度,用现有的“体素蒙皮”方法3D重建。
没有那么多采样过程,应该可以直接以实现方向上潜码的值为暗示进行采样,不为0的地方应该多采样。直接用人体包围盒,把人体截取出来,在包围盒中均匀采样应该也可以。
结构化潜码structural latent code
SMPL有6980个顶点,其所谓“结构化潜码”,就是给这6980个顶点每个赋了一个编码。注意这编码是针对SMPL模型的每个顶点的,不是针对某一帧的。所以最后训练完后,这个编码会跟随着SMPL模型的每个顶点应用到所有帧的所有姿态上,保持不变。 这样能在同一个人的不同姿态动态过程中,保持一定的一致性,这是动态渲染所要求的。
根据源码,这个潜码直接用 nn.Embedding(6980, 16) 计算,也就是说,这个潜码本质是这6980个点,每个点在其总点集中的查找向量。
embd = nn.Embedding(6980, 16)
psi = embd(np.arange(6980))
省略了一些关于shape的操作 可见潜码是和顶点编号绑定,也就是和某个特定的顶点绑定,而无关这个顶点在哪里。也就是所有姿态中的同一个顶点都用同一个潜码,这里蕴含了动态的连续一致。
关于编码
要深度学习、或者要自动处理的往往都需要编码。如果有什么包含了重要信息,比如这里的SMPL模型顶点,要将之纳入深度学习,就要对这些比较“抽象”的东西进行编码。而nn.Embedding()是一个比较万能方法。当然,只能在全集确定的情况下用。
embedding也是可以训练的。
扩散 latent code diffusion
后面需要得到连续空间点(任意实数三维坐标)的潜码,而前面从SMPL只得到6980个潜码。与这些顶点相近的位置潜码当然不应该是0。需要把原油的6980个潜码扩散到周围。这里使用 SparseConvNet (3D卷积)完成。
NERF是体素渲染,这里自然也是。那么把场景(主要是由SMPL人体模型引入的“场景”,其实就是这个模型的周围,6980个顶点分布在这个空间中)体素化就是相当自然的想法。文章把人体包围盒形成的长方体分为 5mm*5mm*5mm 的小体素,6980个含有潜码的顶点就在其中。
所用的稀疏卷积网络是3D卷积。把这个四维数据(三维空间坐标+一维潜码向量)丢入卷积网络,得到扩散后体素空间。
扩散后,任意(连续)点的潜码,由其所在的体素的包围立方体体素中,用顶点的潜码三线性插值得到。
注意世界坐标下的空间三维坐标,应该首先转化为SMPL模型坐标,再进行接下来的步骤。
Q1:继续了解3D卷积。然后这个四维数据是怎么组织的,潜码向量是在第0维(axis = 0)还是第3维?
Q2:潜码的embedding的那个矩阵以及SparseConv都需要训练吗,还是只用训练其中一个,那么另一个用什么参数?如果两个都要训练,感觉怪怪的,仿佛是同时训练输入与网络。
关于扩散
想把某个位置的某种“影响”或“作用”(这里是潜码)扩散到其周围,这个想法就是diffusion。这里用3D卷积实现了扩散。
RGB
体素密度网络是一个两层的MLP,即两个全连接层。直接以所查询点的潜码为输入。输出一个体素密度 。
RGB网络是一个四层的MLP,输入有四个部分:查询位置的潜码、视线方向傅里叶空间编码后的结果、空间位置(SMPL坐标)傅里叶空间编码后的结果、第 t 帧(正用于训练的这一帧)的embedding (即那个奇怪的 )。
输入四个部分,恰好四层,可能是每一层都拼上新东西,也可能是只在最开始全部拼上。由于NERF是在网络中间拼,所以我倾向是每层拼新东西。
具体每个网络 in_channels, out_channels 是多少,到底怎么给输入,还得看看源码。。
最后“落地”
介绍了两种应用:生成新视角图片,以及人体3D重建。
对于某一帧生成新视角图片,因为是在同一帧,动作不变,所以SMPL模型是和训练中一样的,其体素化的包围盒中每个体素的潜码是不变的。所以直接从新视线方向在体素空间中采样潜码,然后丢入RGB的两个网络,得到rgb和体素密度,走一遍NERF体渲染就可以了。
人体3D重建,这个同样是姿态不变,体素空间中有所有体素的潜码。由于体素密度是视线无关的,直接把每个体素的潜码丢入体素密度的两层MLP,得到每个体素的密度,然后用现有方法给体素“蒙上一层mesh”: Marching cubes: A high resolution 3d surface construction algorithm. In SIGGRAPH, 1987. (Marching cubes 算法)。
对每一帧做新视角合成,就得到了自由视角视频。最后该方法似乎没有在动态下有动作上穿帮。
他们在具体做的时候,先把人体根据包围盒投影剪了下来。这也很自然。(不对,好像是说,只在包围盒投影范围内计算评价指标PSNR, SSIM)。