
Transform
整体结构
论文(Attention is all you need)里的Transformer结构是这样的: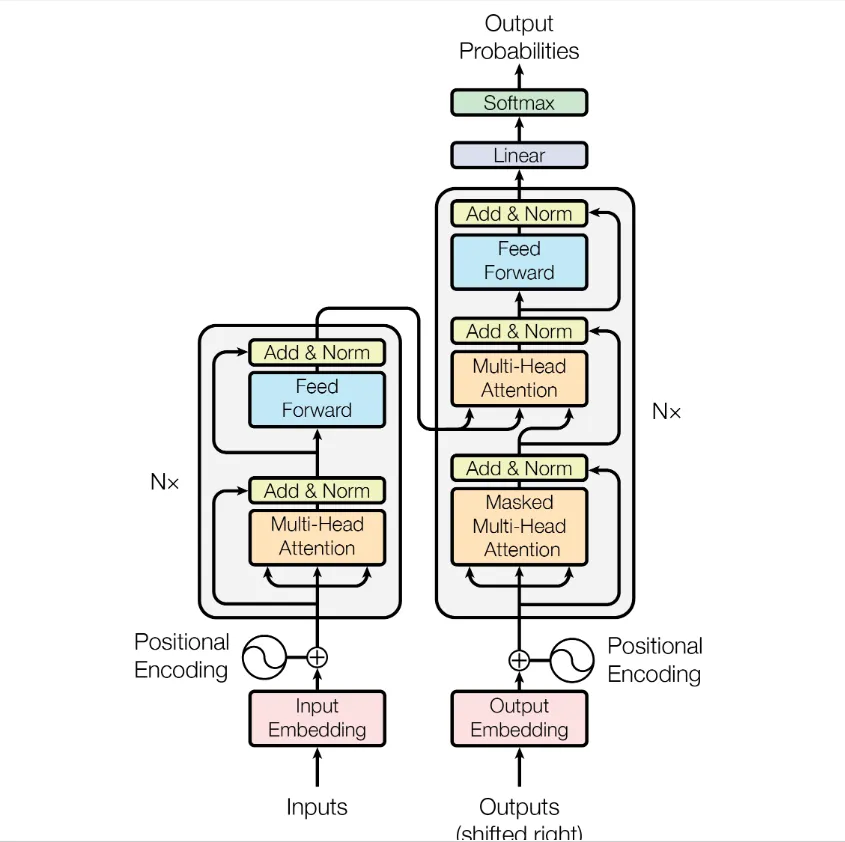
分为encoder和decoder。这俩是栈式结构,每个有六层,实际上是这样的: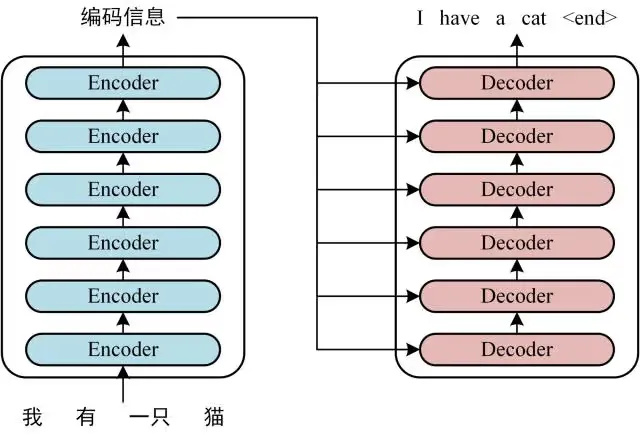
图中的每个 encoder 都是 多头注意力+前馈网络(其实是两层全连接层,中间用ReLU激活函数)。而每个 decoder 都是 Masked多头注意力(为了用于序列预测时当前输出只能受之前序列的影响,需要屏蔽后面的,后面会单独记录)、多头注意力和前馈神经网络。
编码器的输出圈闭输入到解码器各层多头注意力的 Query 端。每个“组件”(即多头注意力或前馈网络)前后都形成残差层,直接相加并且标准化。
为了能够在网络中流动,所有层输入输出维度数一样,论文中是512.
此外,为了保留输入序列相对或绝对的顺序,在输入编解码两端之前,都进行位置编码,然后将原序列和其位置编码 直接求和(控制维度一样)。
编码器的最终输出输入到解码器各层Multi-Head Attention 中的Q, K中。
多头注意力(multi-head attention)与self-attention
注意力机制主要有三种输入:Query, Key, Value。暂不关注具体从源头来说,这是怎么来的,有没有什么特殊的意义。
Scaled Dot-Product Attention
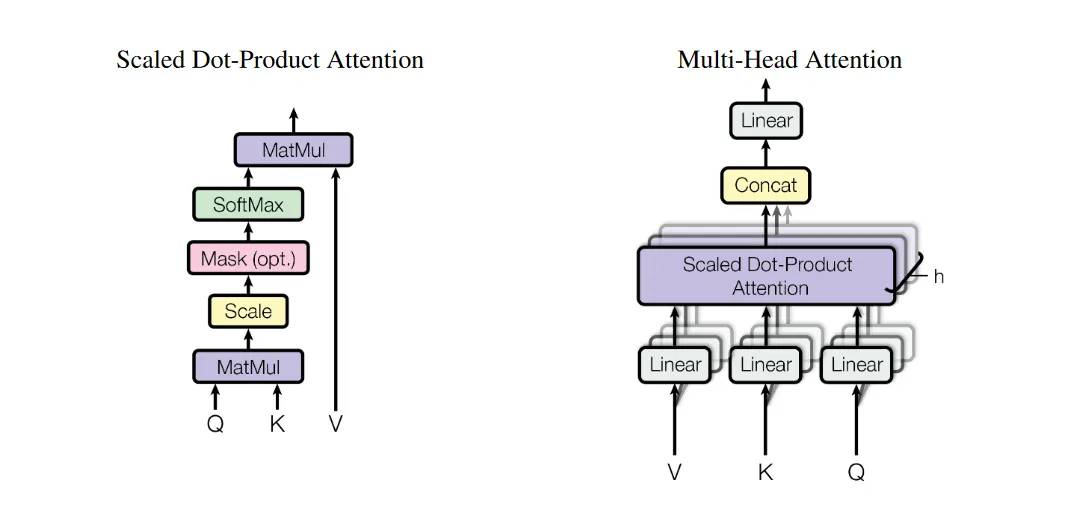
文中介绍了一种此前常用的简单的注意力机制作为前置。Query和Key都是维度为 的数组,而 Value 是维度为 的数组。点乘注意力机制的计算非常简单,先将 Query 和 Key 点乘,然后将结果除以 (减小点乘后的方差,防止点乘导致数据越来越大),最后,将这个常数乘以 Value,得到输出。
当然,上面的内容没有“注意力”,因为都不存在“序列”,更无从说学习序列中的相关性等。将多条数据组织成矩阵形式:(横向量组成矩阵),计算为 ,这样,每个Q都和输入序列中的所有K点乘,除以常数之后做Softmax归一化,每个Q最后都形成了一行权重,而这个Q最后得到的就是所有V以这行权重为权重的加权和。权重体现了对整个输入序列的重要性的选择。于是,注意力就体现出来了。
上述是翻译了公式的计算过程。具体来说,输入一个长度为 n 的序列,序列中的每个元素都是自己的 q k v 向量。使用上述矩阵形式去计算后,Q的第一行(序列中第一个元素)与所有的 k 向量点乘形成了新矩阵的第一行。进行scale和softmax归一化之后,这第一行就形成了一个对所有序列元素的权重。最后的一个矩阵乘法得到结果,V矩阵中所有行(就是序列中所有元素的v)以第一行的权重加权求和,得到了第一个元素对应的输出向量。权重就体现了对序列中所有v的选择。
对于除以 根号 dk,论文给出的解释是这样的:防止数据越来越大的趋势(或者是,越来越“散”?)。假设q, k 向量中的元素是独立的随机变量,均值为0方差为1,点乘后: ,得到的结果的随机变量就是均值为0方差为。所以除以 矫正增大的方差。
Multi-Head Attention
多头注意力改进了上面的算法。直接对序列中的向量组合成的矩阵Q,K,V讨论,对于Q,用x个全连接层将矩阵变换到x个平行的Q’;对于KV也做相同处理;全连接层算完后得到了平行的x对 Q’, K’, V’,也就是所谓的多头。对于每对 Q’ K’ V’,进行上面的 Scaled Dot-Product Attention计算,得到与 V 同纬度的x个 V”,然后将所有 V” concat起来,通过一个全连接层,得到最后的输出(与V同纬度)。
前馈神经网络
transformer结构中,每个多头注意力的输出都立刻进入了一个“前馈神经网络”。它由两个全连接层组成,第一个全连接层升维(到2048),第二个全连接层降维回到512(和输入相同)。中间用ReLU激活函数和标准化处理。
位置编码
因为结构中不存在递归结构,所以为了保留序列中的相对或绝对的先后顺序,对序列按位置进行编码。和NeRF中见到的位置编码类似。
序列中每个元素都有一个由它所处的位置计算得到的位置编码向量: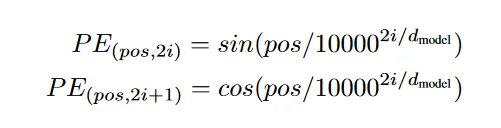
其中 i 是向量中的第 i 维。控制这个向量长度和输入序列中的向量一致,然后直接相加,再输入到网络中。
序列预测(Decoder端)-Mask
仍未想明白的一个问题:解码器的输入是什么,是和输入相同吗?
做序列预测的时候,需要保证当前位置的输出之和这个位置之前的输入有关,所以要把这个位置之后信息遮蔽掉。也就是说,第一个输出只能看第一个输入,第k个输出只能看第k个输入及之前的。这使用这个形状的一掌mask对 QK^T^ 进行mask处理即可: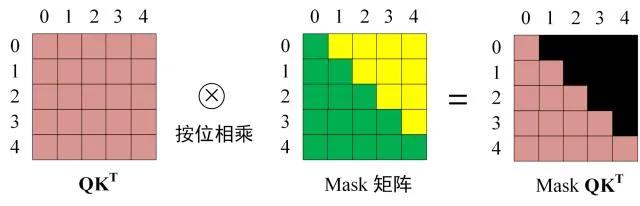
注意,这个mask发生在多头注意力的 点乘注意力阶段,对 QK^T^ 进行处理!这样,第一行输出中只有第一行的Value,第二行的输出只涉及第二行的Value,以此类推。
LSTM
LSTM
遗忘门,输入门,输出门先空着…
GRU
简单易懂的一篇文章:人人都能看懂的GRU
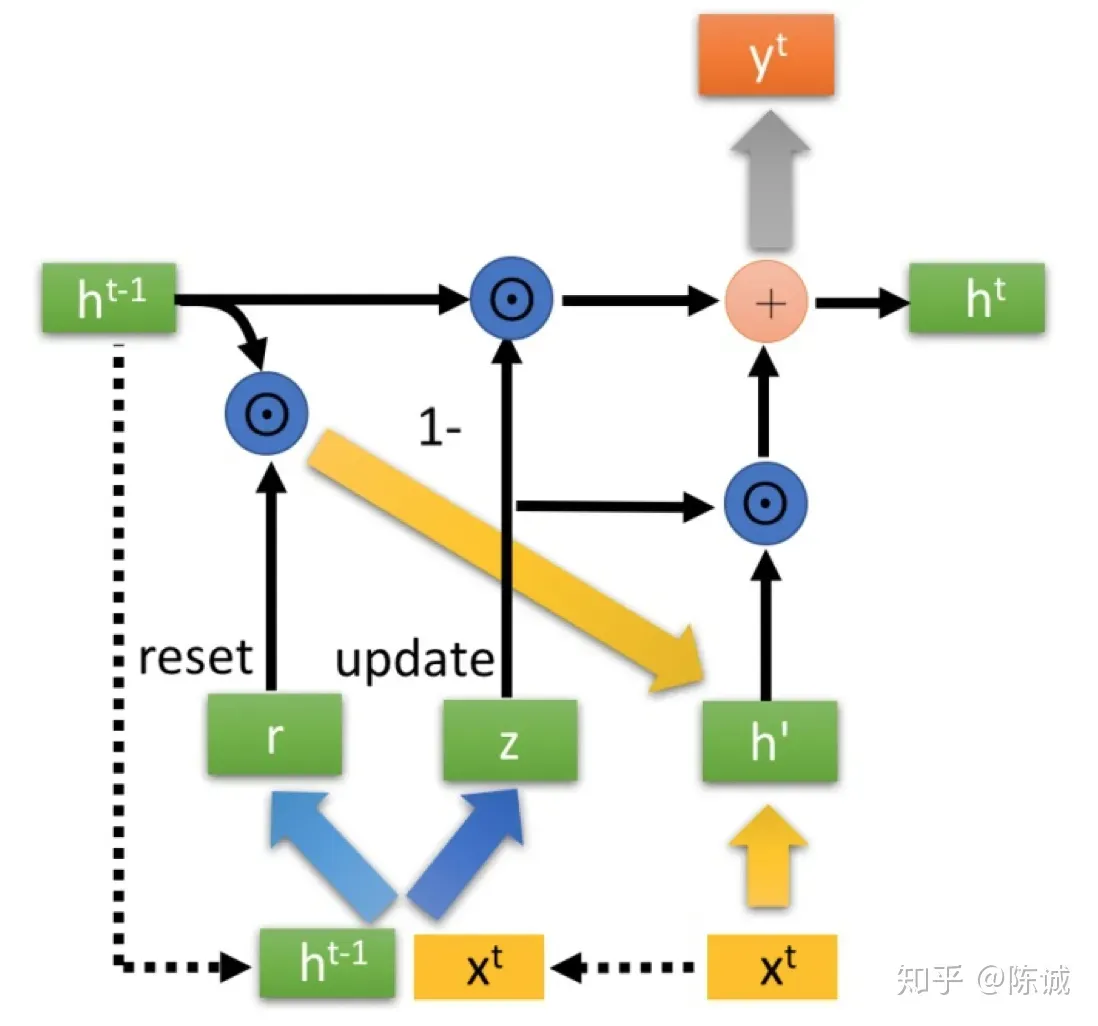
GRU (Gated Recurent Unit ) 形式上和RNN几乎一样,而内部思想和LSTM有许多相似之处。一般情况下GRU能取得和LSTM相近的结果,而计算开销更小,所以现在一般选用GRU。
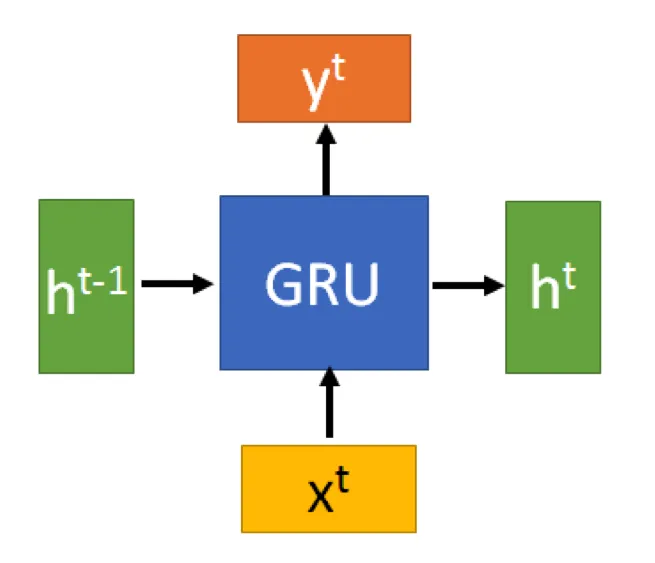
GRU的形式几乎和RNN一样,输入以及上个阶段传进来的隐状态 ,输出一个输出 和要输入到下一次计算的隐状态 。
GRU有两个门控:重置门 r 以及更新门 z,说是门,其实是两个值。计算如下:
其中小括号 ( ) 表示将两个输入进来的向量 concat 起来。将两个矩阵W视作一个大矩阵的两个分块,可以写在一起(下面的式子中忽略了转置等细节):
这两个门有不同的作用。r 更像 LSTM 中的一个“选择门”,对之前的记忆做“选择”:
h’ 将为真正的输出做贡献:
另一个 z 是更新门,用来决定当前这个GRU要传给下一步什么信息:
注意后面那个是 h’,经过了 r 的选择。