
CAUTION强化学习理论比较复杂,我是边看边瞎琢磨边记,有时候看到后面(或者过几天)发现前面想的不太对,就有了一些补丁性质的句子(或者干脆没改),谨慎阅读…
策略梯度:PG
前面的DQN是 TD with NN,也就是每步都更新。而PG就是蒙特卡洛with NN,一次采样完一个完整的轨迹(),也就是(s,a,r)三元组的序列,然后直接在这整个轨迹上计算从每步开始的折扣累积误差,然后用这个结果做训练。
PG不再需要Q函数近似,因为蒙特卡洛方法的累计奖励可以直接算出来。
用一个函数(比如神经网络)来作为policy(参数为),它做的是输入一个state,输出这个Policy下每个action的可能性,然后根据这个概率进行采样。可见这是一个混合策略,而动作空间是离散的。
如果使用另一种形式,输入当前状态s和动作a,输出可能性,就可以用于任何动作空间。
策略的目标就是最大化累积奖励:
其中这个路径的可能性为:
其中,前面是环境的转移概率,后面是参数为的policy在状态为的时候预测出的动作 的概率。前面那个转移概率是不知道的,但是它和无关,所以对求导的时候不会涉及到它,之后可以直接省略。
对目标函数 J 做点手脚,引入log将累乘变成累加:
将上式中的 拆开,可以得到:
最后梯度式变为:
注意这个求期望的E,期望代表着可以用轨迹的平均值去估计:
最后那步怎么来的,我不是很理解。怎么用,看下面的“实践中”。
在自动求梯度的软件中,只用算上式的一个不定积分就可以了——也就是,“损失函数”(仅是为了便于理解)是这样的:
注意我们要的是“梯度上升”,而一般是梯度下降,所以取反。
实践中
在实践中,似乎是直接把一次采样得到的长度为 T 的轨迹拆分成 T 条长度为 T, T-1, T-2, … 1 的轨迹,然后直接套入上面最后一个公式,将每步开始的累计误差乘以这一步采用这个动作的概率(的ln值),然后把所有时间步的这个值加起来得到最后的loss(取反)(不用除以n),然后就直接求导了。
也就是,对于轨迹,从轨迹中时间步 i 开始的折扣累计奖励为 ,在这个时间步下(状态)使用动作的概率是 ,使用的损失函数为:
这背后在化简上的考量,我没想懂;但这个式子是非常好实现的。
此外,在累计奖励上,存在一个标准化的技巧。需要计算轨迹中从每一步开始的累计奖励,可以从后往前增量式计算,很简单;而算完所有的累计奖励后得到一个数组,对它进行标准化(减去平均值、除以标准差)有助于提高训练速度与效果。——这是因为Policy采样的轨迹之间可能差距较大,如果不对累积误差进行标准化,很可能会引入大方差(当然,即使标准化了,也未必能消除这一点,因为轨迹之间的较大差异毕竟是客观存在的)。——所有的策略梯度方法,或者是非TD一步一更新的(比如,攒几个batch再更新),都经常用reward数组的标准化技巧。
此外,需要有一个结束迭代的时间,一个做法是用一个running_reward,,每次采样得到一个长度为T的轨迹之后就更新为 running_reward = (1-) running_reward + T,其中 一般比较小,比如0.01,然后给个阈值, running_reward大于这个阈值之后就结束。——这其实不是很重要。
REINFORCE
这是最简单的策略梯度算法,几乎完全就是上面这个公式的实现,伪代码为:
Actor-Critic框架
基于TD的DQNs可能因为采样不够而使Q函数与真实的有较大偏差;PG可能因为采样得到的轨迹之间相差过大导致高方差。Actor-Critic将两者结合:一个Actor表示Policy,根据环境做决策,一个Critic做评估。这样,在更新策略的时候,就不直接用轨迹真正的累积奖励,而是用Critic预测的奖励;而Critic的预测结果与真实的累计奖励做比较得到Critic的误差(这个是真正的误差,因为Critic确实是要去拟合值函数V)。
AC框架既可以TD也可以策略蒙特卡洛。如PG的最后所示,策略最大化目标函数J已经被简化成了直接拿当前状态下选择此动作的概率的ln乘以相应的累计奖励(虽然不知道为什么最终简化成这样了)——而Critic可以预测这个累计奖励了、而不需要等到采样出完整的轨迹。J函数的(Policy,or Actor)一端的优化问题解决了。但Q函数那边(评估网络,Critic)的更新需要引入DQN的思想,让Q估计函数具有Q函数该有的性质:满足Bellman方程。下面的Q AC就是一个例子。
可见第一次更新theta的时候,就是用的上面的J函数,不过把真实的R值换成了Q函数估计的值;更新Q的时候,让Q尽量满足Bellman方程。没有target net,也没有replay。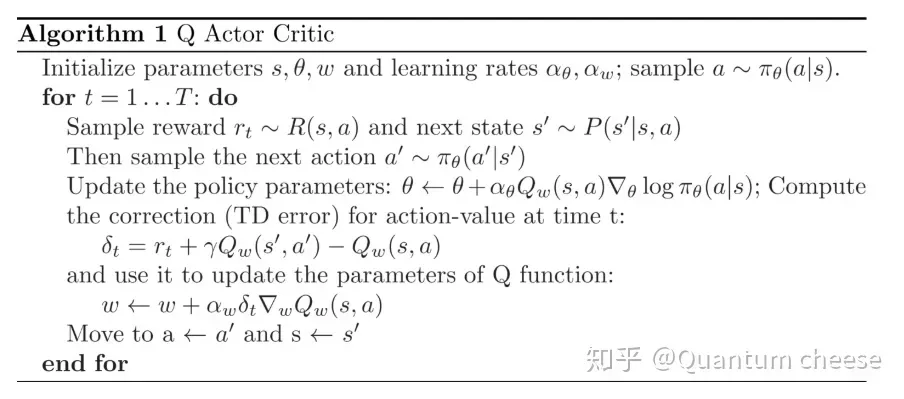
一般情况下,说AC就是指类似上面这种的QAC,使用TD而非蒙特卡洛。
AC用蒙特卡洛方法去做更加自然,直接采样得到一个完整的轨迹(这个轨迹中包含每步预测出来的Value,即从该步开始的累计奖励),然后用这个轨迹,把上面的J函数中的真实累计奖励R换成预测的累计奖励Value,来更新Actor(Policy);同时可以从轨迹中算出真正的累计奖励,用预测的奖励Value和真正的累计奖励之间的误差来更新Critic(Q or V)。这里Critic可以用Q也可以用V。Actor和Critic可以用一个双头输出的网络也可以直接用两个网络;如果用双头输出的单个网络需要将两个loss加起来来更新。用双头网络可能从直观理解上更说的过去一点,因为Critic是专门用于评估当前的Actor的,两者间的参数应该有点联系——当然这句是口胡的。 我看到的一个AC的简单实现里,就是用了一个双头的神经网络,一个共用的隐藏层,一个输出层输出各个动作的概率,一个输出层输出当前状态的预测值V。
这个AC框架是不是有点对抗学习的意思,当然并不是对抗学习就是了。常用的AC框架中ActorCritic是同时更新的,是否可以交替更新?
A2C: Advantage Actor Critic
AC仍旧有方差较大的问题。这个问题最后似乎还是会回到限制更新量,这在PPO算法那一路有非常详细并且非常数学的讨论。A2C简单地用Advantage函数A代替上面AC框架中Actor(即Policy)的目标函数 J 中的(Critic预测的)累计奖励R。具体为:。在我看到的一个实现中,用Critic拟合值函数V,而Q(s, a) 直接用真实的累计奖励R。而在更新Critic的时候,用了真实的累计误差和所预测的V的均方误差MSE,也就是
A2C更多的讨论放在了它的并行框架上。它有多个子进程跑了多个独立的env,这样每一个step相当于都获得了一个batch。而且由于env的状态转移不是确定性的,所以多个env可能模拟出不同的转移,获得不同分布数据——这一点联系DQN的replay机制来考虑,replay机制就是为了防止直接更新时在局部时间见太多相近的数据,多个并行的env达到了类似的效果,然后就可以同时每次step直接用当前step训练了——当然,实现的时候还是积累了几个(比如5个)step之后才更新的。
实现细节
一个并行env结构。召唤出m个子进程,每个子进程建立自己的env并且reset,然后接收step等字符串指令。每次收到一个step指令和相应的action后,就step一步,把所有结果(next_step, reward, done, info)通过Pipe返回给这些进程的管理者对象。
管理者将这些结果stack在一起(这样,返回的reward中,reward[0,…]就是env0的reward),然后将结果返回。
每次执行若干个step,每个step,除了记录envs返回的next_state和reward,还记录当前state以及动作a以及相应概率的ln值;同时,还计算这次的多个action的分布的熵的平均的累计,也就是 entropy += action_distribution.entropy().means() ,根据熵的计算公式 ,这个loss会约束分布密度中的值要么0要么1。收集到所有数据之后,计算真实的累计误差R(注意根据done,如果已经结束了就乘以个0,这通过reward+gamma*R*(1-done)实现),将R和记录下来的每步每个env的value作差,得到A。
相A和每步可能性的ln相乘并求平均,LossActor;将A求平方再求平均,LossCritic。
最后的loss是 LossActor, LossCritic, entropy 的加权求和,这个权要根据任务慢慢调,entropy的权一般比较小。
原本来说,似乎是在envs得到多个result的时候就直接求平均,显得好像只有一个results,然实现的时候是保留了所有的原始result,一直到最后算完了loss直接对各个loss求平均,这样比较符合一般的batch操作处理。而最后多个了entropy loss,也应该注意。——OpenAI的Baseline源码中给的注释是:Entropy is used to improve exploration by limiting the premature convergence to suboptimal policy.
此外,这个实现里还包含了一个test_env,训练了一定步数就跑一次测试env,这就不是重点了。
OpenAI的baseline里优化器用的是RMSProp。
A3C
A3C是更早的版本,是异步的版本。也就是,每个env都有一个local网络,独立地不停地跑,跑完一轮(done)之后通过策略梯度A2C计算梯度,上传到global network,然后将新network更新为这个env的新网络,之后这个env重新跑。这样每个env里的网路都不太一样,而每次用不太一样的网路的梯度更新到了同一个global网络上,说起来就有点问题。
连续动作空间下的DQN:DDPG
CONTINUOUS CONTROL WITH DEEP REINFORCEMENT LEARNING
DQN无法应对动作空间是连续的情况,因为它的状态-动作估计函数Q(那个神经网络)以状态为输入、所有动作对应的累计奖励估计为输出。人们逐渐发现有必要专门用一个估计函数,比如一个神经网络,来表示一个策略。DDPG (Deep “deterministic policy gradient (DPG)”) 使用了确定性的策略表示:一个 ,输入当前状态,直接输出当前应该采取什么动作(一个连续向量)。
优化目标当然仍旧是最大化策略的状态-动作函数,仍旧是DDQN的框架,一个神经网络来估计 ,replay,探索和训练用的网络分开(目标网络 ,即double方法)都保留。
优化目标是Critic预测出来的累计奖励的期望最大,J函数直接就是给定s, a时Q函数在下的值的期望, ,里面的R仍旧是折扣累积误差,用Q函数去估计而不是真正的R值.
当然上面是梯度式,但第一行去掉那个梯度算子就是J函数了。 是一个所谓的 state visitation distribution,不知道具体啥意思——大概是采用策略 的话,环境的状态是一个什么样的分布,因为状态转移是和策略有关的——但实用中一般也是忽略它的。
我们要优化策略表示中的参数 来最大化 J,就要对 求梯度,Q函数里面没有 ,但有 a ,而 动作 ,所以可使用链式求导法则,就是上式的第二行。
我们在自动求导框架下实现这个式子,是不需要关注什么链式求导,我们只需要让这个梯度所代表的Loss是这样算的就行了:L=-Q(s; Actor(s;\theta^\mu)) 就可以自动算出导数来了,注意取了反来用梯度下降“解”最大化问题。
期望代表着这个式子可以用采样取平均来近似,实现中就是一个minibatch的J的平均。
在更新 的同时,还应该更新Q函数的 ,这部分完全和DDQN一样,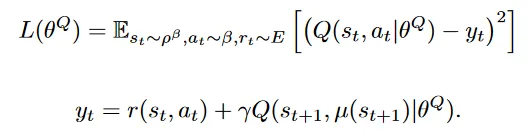
不过里面的“下一步动作”是用 函数得来的,而不是最大Q。这个公式仍旧是DQN的思路:让有Q(Critic)有Bellman公式的性质。注意,具体地,因为Actor和Critic都有两个,这个公式里的 y 全部都用 target 网络计算(包括计算下一步动作的,用下一步状态和下一步动作预测下一步收益的Q函数);而与这个 y 做比较的是 current_value,使用当前状和当时使用的动作用Critic(非target)来预测累计奖励(注意,不是真正的R值)。
DDPG的训练仍旧使用 replay。上面的所有学习都在replay buffer 中采样。这和前面的AC框架、A2C不同。A2C使用多环境并行框架来实现打乱观测到的环境分布了。
总的来说,DDPG和DDQN大致一样,不过DDQN中,动作a通过寻找最大化Q的a来实现;而DDPG直接有一个专门的 来求a。把DDQN中所有寻找动作 a()的换成 (并且考虑相应的double方法修正),并添加更新 的那个损失函数,就基本能得到 DDPG。
其它修改和 tricks
其它还有点修改,包括:
- 两个目标网络:,在使用double的时候,不是定期完全复制参数,而是每步这样更新: ,这个 取得非常小(0.0001),因而更新地非常慢,不过作者认为由此带来的稳定性outweighted。
- 探索时,替代 贪心,使用了一个随机过程(Ornstein-Uhlenbeck process)N,选择动作时用 。
- 其它,如网络具体是怎样的,用batch normalization统一尺度,Critic网络用tanh层作为输出层,等等,往往不同任务所需不同,故略过了。
- DDPG训练同样可以引入多个并行的env。大部分方法都可以。
- 实践里,那个选择action用的随机过程,可以直接用Normal正态分布。OpenAI的baselines里,除了原本的UO、正态分布,还给了一个不知道是什么的 AdaptiveParamNoiseSpec。
- DDPG的Actor预测的连续action值都是 -1~1 范围的(因为Actor输出层的tanh函数的输出就是 (-1,1) 范围的),在env step的时候要乘以action的最大值scaling回去。
- DDPG不是像DQN那样每步都从buffer中采样更新的,而是一口气跑好多轮,然后一口气update好多轮。 前面一口气跑好多轮,可以是指定的轮数,也可以一直到跑完整个轨迹。
DDPG算法伪代码
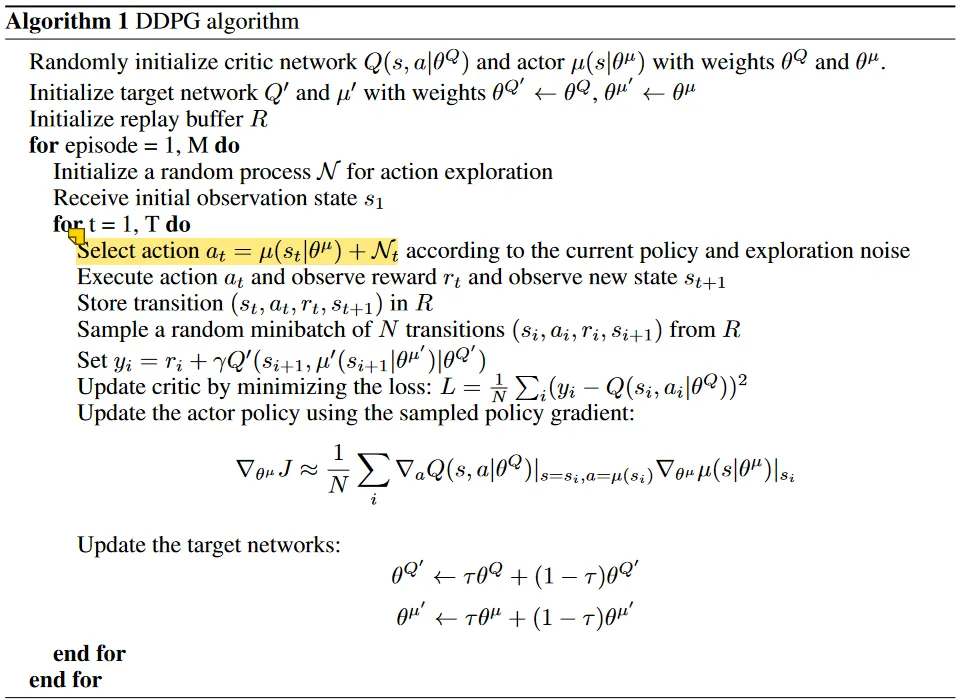
仍旧是Q-Learning框架,只是有了两个网络要更新。
策略梯度:PPO
相比DQNs,PPO所代表的的路子在数学上复杂许多,可以看看这篇文章:Proximal Policy Optimization (PPO) 算法理解:从策略梯度开始.
这条路子基于策略梯度 policy gradient - Actor-Critic框架,虽然不是确定性策略而是混合策略,但目标都是最大化期望累积奖励(上面的J)。
PPO实现
OpenAI baseline 的PPO2实现是tensorflow的,我这里看的是别人的pytorch版本,注意其中的tricks,比如reward,advantage标准化、对正态分布标准差sigma非负约束的处理(exp(.))等。
Actor-Critic
Actor, Critic 的框架。一个单独的Actor,一个单独的Critic。Actor是混合策略,当然离散动作空间和练习动作空间要不太一样的网络。注意激活函数都用了tanh(这和不同的任务也有关系…逐任务调整..)。
此外,之后在梯度更新的时候也用到了 clip_grad_norm_(不一定用,因为PPO已经有clip来限制更新了,当然也不一定不用..),进行梯度衰减,来限制梯度的最大最小范围。具体做法是,指定一个梯度的范数(比如L1范数L2范数等,一般默认是2),指定最大范数 max_norm,计算梯度的总范数total_norm,如果maxnorm / total_norm < 1 说明未越界什么也不用做,反之越界,需要scaling:将梯度 / total_nom * maxnorm。clip_grad_norm限制了梯度更新的范围,一定程度上预防梯度爆炸或过大的抖动。
执行
PPO同样既可以每步一更新、也可以玩完完整的一轮再更新(until done)。PPO是这样的策略:准备一个buffer,连续探索多轮,每次都把transition(state, action, rewad, next_state, log_action, value_from_critic)推入buffer中,一旦buffer满了,就执行若干步更新,每次更新都在buffer中采样一个minibatch,更新完之后直接删除弃用这个buffer,重新累计buffer。——这其实是在积累一个batch。然后在这个batch上训练多次minibatch,训练完规定的轮数之后当然弃用这个batch.
执行的时候,不计算任何梯度,所以都是 with net.no_grad()。对于每一个state,网络输出 action 的分布,从中采样一个得到当次执行的action,然后取其概率的 ln 值为 log_action_prob。将state与action输入到 Critic 中,得到value,然后将action输入到 env 中向前执行一步,得到 reward, next_state, done。
将上面取得的一步信息:Transition(state, action, rewad, next_state, log_action, value_from_critic)压入buffer中,等待后面的更新。此外,还要用action的分布计算一个 entropy,并且加到一个累积变量上,最后要用作 entropy loss。
更新
每当buffer满了的时候,执行若干步更新:PPO.ppo_epoch步。
Advantage
PPO的J函数是基于优势函数A的。PPO 论文没有规定自己用的什么Advantage实现,不过baseline里用的可以仔细说说。
一般说的势函数是 。PPO等很多用到势函数的实现里,都在每步探索的时候保存了一个额外的 return 值——每步都有一个return,最后使用的势函数为 A = return-V。可见 return = A+V,return一般会使用GAE,使用GAE的return会在下一节讨论(现在GAE已经是标配了)。这里暂时先使用普通的 return。
在每步执行的时候,会保存:state, action, log_action, reward, next_state, value。注意,把当前状态输入Critic里的Value结果也保存下来。
然后得到一个轨迹(完整地到done或者只是一个batch),计算 return。return的算法是:
returns[-1] = next_value_in_last_transition
for step in reversed(range(len(buffer))):
returns[step]=Reward[step] + gamma * returns[step+1] * mask[step+1] \
+ value[step] 注意最后那个 +value,之后要在算 advantage的时候还会把它减掉..不知道为什么要加上它,是最后为了计算梯度必须要在更新步骤的时候有这个减法吗?
里面的 value 是Critic预测出来的。Reward则是真实的。mask = 1-done。如果某一步的时候done了,它mask[step]就为0.
之后在更新步骤,计算的 Advantage 为:
Advantage = returns - buffer.value
Advantage = (Advantage - Advantage.means())/Advantages.std() 直接把计算出来的returns值减去积累下来的每步预测的 value 值就行了。注意,不要忘记对Advantage标准化的技巧!
ratio, and action_loss(PG_loss)
每次从buffer中取出minibatch条 Transition。取出 记录中的log_action 作为 old_log_action(表示模型更新前Actor算出的 log_action_prob)。然后将state输入到已经进行了一定的更新的 Actor 中取得新的 new_action_distribution,采样得到新的action,并得到相应的 new_log_action_prob。 注意要重新选择动作,来使得actor能够被更新。
PPO2 是 clipped 版本,所以Actor的Loss是 PG_loss = exp(new_log_action_porb - old_log_action_prob) * advantage,然后取个截断:PG_loss2 = clamp((1-epsilon)*advtange, (1+epsilon)*advantage, PG_loss2),最后取两者中的下界 PG_loss = min(PG_loss, PG_loss2)。注意要对PG_loss取反。
Value_loss (Critic_loss)
另一边,Critic的Loss:value_loss 的计算为:将state和上面那里算出来的新动作输入 Critic 得到一个 新的 Value —— 显然要更新Critic网络肯定要用它来算个Value纳入Loss中。然后 Value_loss为 Value_loss = (returns - new_value)**2.means()(MSE),(return 在前面加过一个value,直接用returns减去new_value好像有点怪…)。
Value_loss 也可以加 Clip(同样出于限制更新量的动机)(上面也可以直接用,不过没有clip的限制),此时会是:
value_clipped = value + (new_value-value).clamp(-clip_para, clip_para)
value_loss1 = (returns - new_value)**2
value_loss2 = (returns - value_clipped)**2
value_loss = min(value_loss1, value_loss2).means() 其中 value 是探索过程中积累下来的,new_value 是更新的时候新预测的。
at last
最后算上 entropy loss(它也要取反,否则趋向于滑向中间0.5),做带梯度衰减(clip_grad_norm_,也不一定会用它,因为已经有clip了…)的梯度传播。
更新完一定轮数后,结束更新,然后删除整个buffer,继续探索。
More about PPO 实现
Details about Advantage
咕.
GAE with PPO
GAE generalized advantage estimator (GAE在下一节有简单介绍) 能够适用于所有适用了优势函数的方法,包括PPO,它是PPO等方法的baseline的标配了。关于GAE更多具体的东西,在后面GAE小节。
PPO中引入GAE,用的就是下面的GAE的递推形式;引入GAE的环节就是算returns的时候,returns 变成了 GAE+value(探索时预测的):
gae = 0
value.append(next_value_in_last_transition) # 多加一个,最后一个transition的next_state的value.
for step in reversed(range(buffer.size)):
delta = Reward[step] + gamma * value[step+1] * mask[step+1] - value[step]
gae = delta + gamma * lambda_ * gae * mask[step+1]
returns[step] = gae + value[step] 之后就都一样了。GAE就是Advantage,return = GAE+value,之后更新的时候减去value,Advantage就是GAE了。
Recurrent
这是在网络上的技巧了。Actor可以加入递归神经网络来将时序上的一些信息纳入策略的考虑,一般使用 GRU,由于GRU额外会输出一个要输入到下一次推理的 ht hidden state,所以在记录 Transition 的时候要把这个 隐状态也同步记录下来,之后更新的时候需要用上(因为更新参数的时候一定需要Actor推理)。
GAE: Generalize Advantage Estimator
参考文章:GAE(其实下面这节内容几乎完全来源于它)。
梯度估计方差大的问题在所有RL方法中都存在。GAE是一种广泛适用的advantage估计方法,这种估计方法能够减小方差。
首先,试图对大部分PolicyGradient的RL方法做个总结,它的目标函数(J函数)是这样的:
(这里的g相当于前面讨论中的J)他们都是无偏估计(注意,这里是指当QVA都是准确的时,而非估计函数估计出来的),其中 4, 6 有最小的方差。
上面的累计误差是直接把每步的reward加起来,我们熟悉的一般是 折扣累积误差,这里将 以参数的意义引入:

注意,这里的 相对于前面的 g 就是有偏 的了。我们前面的reward带有折扣的RL方法里策略的目标函数都是这种。
是否可以找到一种 ,使得在无穷步下, 和 能取得一样的期望?——这被称为
论文证明如下击中都是 -just。
(用这些函数去替换上满 中的 )
更加generalize一点,取一般形式(GAE)为:
(这里有个问题,中下标l应该从0开始)
它有如下性质:
可以看出, 就是上面说的优势函数, 就是TD差分。这也从理论上暗示了为什么后续使用优势函数 能获得更好的结果。
这实际上是不断把势函数一般化的过程: 控制着 和 真正无偏的 g(应该不能取得?)的偏差, 控制着一般化形式 的偏差。我们希望学习用的梯度的方差尽量小,就需要较小的 ,但这一定会引入额外的偏差。有了两个参数,可能可以有些弥补或 trade off?
GAE 和另一种技术 reward shaping 有关系,但我没看。GAE像是从另一个“起始点”审视了 policy 最优化目标函数的问题。我从一开始看西瓜书就是 折扣累积奖励,没想过这方面的。——实际上,最“正宗”的累计奖励就是每步的reward加起来才自然,引入折扣来强调相近的时间必有损失(虽然实践上需要这么做),GAE就进行了这一点的讨论,这是学习中的实际情况(梯度方差)和函数估计的理论偏差之间的 trade off。
实践里,GAE当然也有自己的递推形式:
其中