主要学习自GAN introduction from Lil。本文只是为了梳理、记录我自己的理解以加深印象,大部分内容和图片直接来自于它。
本文加入了一些自己的不成熟的理解,建议去看原博客,或看原论文以免被误导。
这篇post本身也已经很早了,17-18年的,内容远非最新进展。当然由于主要讨论数学原理,所以不会过时。
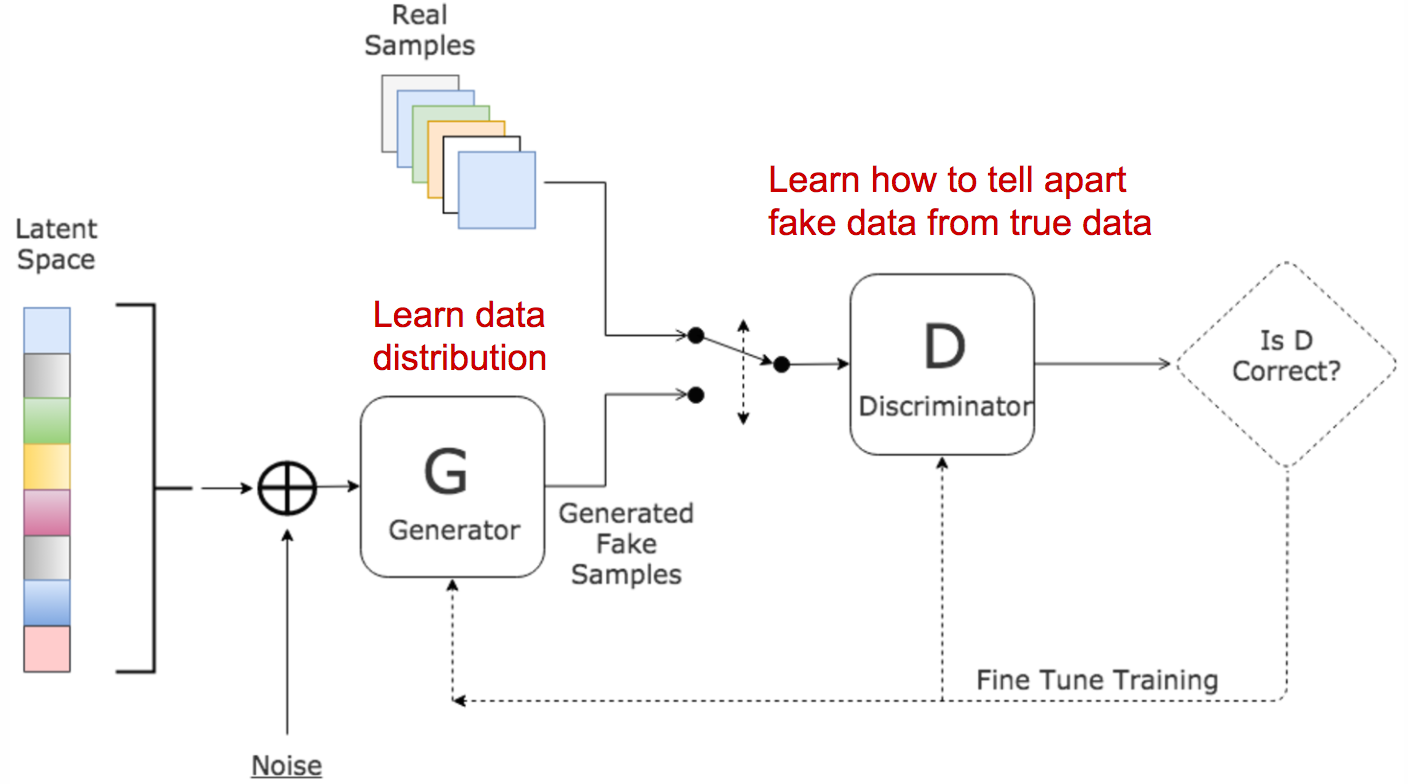
生成对抗网络受启发与博弈理论,为了生成足够以假乱真的生成结果,使用一个生成器和辨别器进行博弈,生成器生成越发逼真的数据以欺骗辨别器,辨别器学习生成数据和真实数据的差异以辨别真假数据,两者在左右互搏中不断进步,最后丢掉辨别器,得到那个能以假乱真的强大生成器。
本文关注GAN背后的数学原理,而不是具体的各种五花八门的GAN网络。
数学前置#
KL散度 Kullback–Leibler Divergence#
KL散度DKL(P∣∣Q)用来衡量两个分布的距离,即 P (概率密度)和 Q (概率密度)有多大差距、分歧。公式:
DKL(p∣∣q)=∫xp(x)logq(x)p(x)dx当p, q完全相同的时候,KL散度最小,为0.
KL散度的P和Q 重要性是有区别的,从公式可以看出,如果p(x)接近0,那么q(x)必然大于0,右边(q)的值是被左边(p)制约的,左边的重要性或者“自由程度”大于右边,所以算两个分布之间的差异时,KL散度中的左右顺序不是那么随意的,一般更重要的那个(要优化的那个)放左边。如果两个都一样重要,都要优化,那可能会有问题。
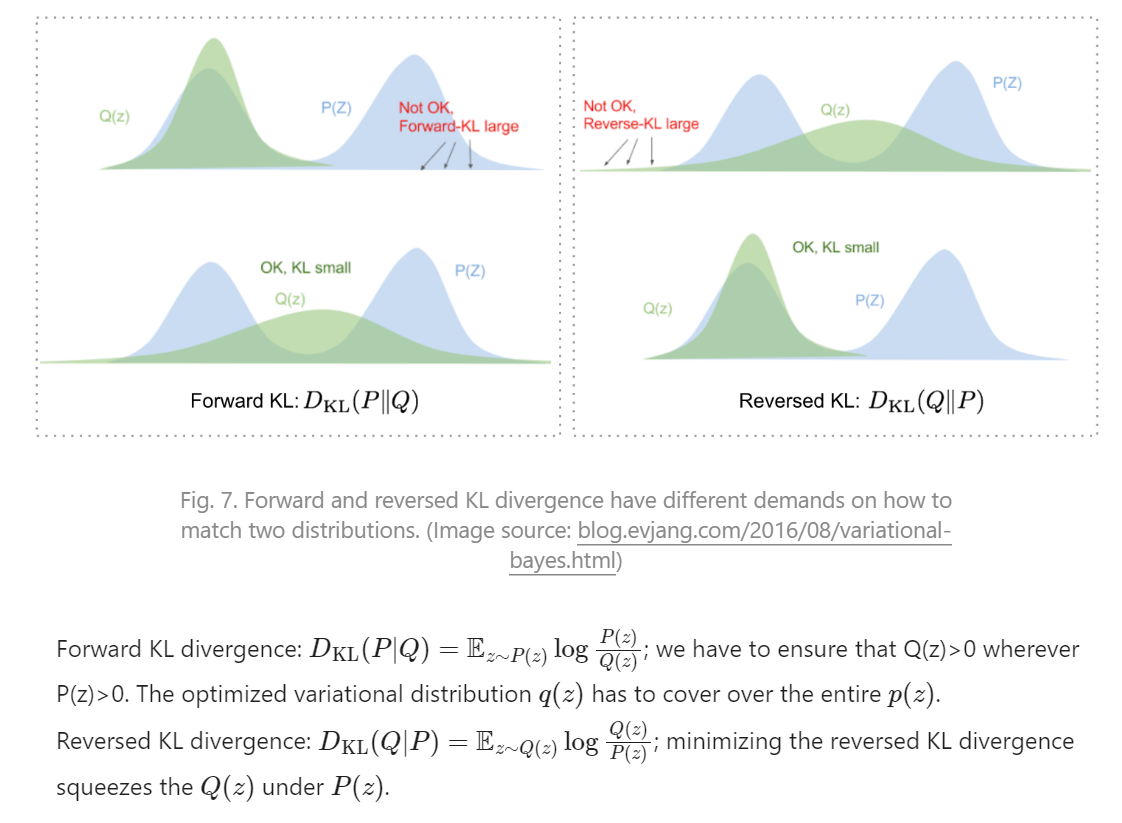
(上图假设要优化Q)
Jensen–Shannon Divergence#
JS散度是另一个衡量两个分布之间距离的方法,它基于KL散度:
DJS(p∣∣q)=21DKL(p∣∣2p+q)+21DKL(q∣∣2p+q)JS散度的范围是[0,1],它有个很大的优势是JS散度中PQ的地位是相同的、对称的。有人认为GAN的成功在于用JS散度替代了KL散度,来衡量两个分布间的距离。
GAN#
GAN的优化目标#
GAN的优化目标很明确、简单,也好理解。
GAN的典型结构如最上面那个图所示。生成器 G 努力欺骗辨别器 D,而辨别器 D 努力不被欺骗,这是一个 零和博弈。
给定符号:
| 符号 | 意义 | 标注 |
|---|
| pz | 输入的噪声z的分布 | 一般就是均匀分布 |
| pg | 生成器生成的数据的分布,生成数据是x的概率密度。G依赖pz的采样的作为输入,所以这个分布受pz影响 | |
| pr | 真实数据的分布,真实数据是x的概率密度 | |
D(x)需要把真实的x认为是真(1),而虚假的x认为是假(0)。所以一方面,D要尽量把真的认成真:
x∈dataset∏D(x)x∈dataset∑logD(x)∫xpr(x)logD(x)dxEx∼pr(x)logD(x)也就是最大化 Ex∼pr(x)logD(x)。
另一方面,类似的,把虚假的数据 G(z)(z是从pz中采样来的G的输入)辨别为假的:最大化 Ez∼pz(z)[log(1−D(G(z)))]
而生成器G的目标就是相反,要最小化上面两项。
故而,最终G, D形成了一个最大化最小化(minimax)博弈:
GminDmaxL(D,G)=Ex∼pr(x)logD(x)+Ez∼pz(z)log(1−D(G(z)))=Ex∼pr(x)logD(x)+Ez∼pg(x)log(1−D(x))以上更多是针对D而言的。我们最终需要的是G,让G尽可能以假乱真,就是让 pg(x) 尽量和 pr(x) 一致。
解析GAN的损失函数#
上面的L(G,D)就是损失函数的理论形式。它可以解释地非常直白通俗,但这里将从理论角度上更深入地解析这个损失函数:优化这个L(G,D),实际上优化了什么。
拆解问题,只考虑D,给定x,最优的D(x)是什么?#
L(G,D)=∫x(pr(x)logD(x)+pg(x)log(1−D(x)))dx假设:x˜=D(x),A=pr(x),B=pg(x),有:
由于x需要遍历,所以我们可以先考虑一个固定的x,只考虑积分内的东西而不考虑积分,如何取D(x)(x˜)的值让积分内的这个式子最大?
f(x˜)dx˜df(x˜)dx˜df(x˜)=Alogx˜+Blog(1−x˜)=Ax˜ln101−B(1−x˜)ln101=ln101x˜(1−x˜)A−(A+B)x˜令 dx˜df(x˜)=0,有:
D∗(x)=x˜∗=A+BA=pr(x)+pg(x)pr(x)最优化了积分内的东西,考虑上积分#
对于任意x,我们知道了D(x)的取值需要为多少来最大化积分内的东西。进一步考虑生成器G,在最理想(也就是对于G来说的最优)情况下,G完全能以假乱真,那么 pg(x)=pr(x),此时 D∗(x)=21,则式子变成了:
L(G,D)L(G,D)=∫x(pr(x)log21+pg(x)log21)dx=−2log2∫xpr(x)dx=−2log2变成一个常数了。
不论 G 是否达到最优(也就是 pg=pr),给定生成器G和真实数据R后,D(x) 的值对于每个x来说都是确定的——D(x)的取值看起来是封闭形式!——虽然 pg(x),pr(x) 算不了。
进一步:以G的目标的角度#
不要忘记:GAN最终需要的是生成器G,它的优化目标是让生成的结果以假乱真,也就是让 pg 尽可能和真实分布 pr 一致,使用 JS 散度而非 KL 散度计算这两个分布之间的距离:
DJS(pr∣∣pg)====(21DKL(pr∣∣2pr+pg)+21DKL(pg∣∣2pr+pg))21(log2+∫xpr(x)logpr(x)+pg(x)pr(x)dx)+21(log2+∫xpg(x)logpr(x)+pg(x)pg(x)dx)21(2log2+∫x(pr(x)logD∗(x)+pg(x)log(1−D∗(x)))dx)log2+21L(G,D∗)上面的推导中,第一步是直接把KL散度写出来,然后将log中的常数2分离出来。然后代入给定G时最优的 D∗(x)=pr(x)+pg(x)pr(x).
于是,前面的L(C,D∗)可以用JS散度表示为:
L(G,D∗)=2DJS(pr∣∣pg)−2log2所以,优化L(G,D) 就是在优化 DJS(pr∣∣pg),也就是让 pg 越来越接近 pr,越来越以假乱真。
实际使用的GAN损失函数#
前面的更多是对GAN的优化目标的 L(G,D) 的分析,这里简单介绍下实现中GAN的损失函数形式(仅最基本的一种)。
首先,优化生成器就是让D(x˜)=D(G(z))尽量接近 1。
LG==⇒==Ez∼pz(z)[−logD(G(z))]∫zp(z)(−logD(G(z)))dzn1i=1∑n−logD(G(z))−n1i=1∑n[logD(G(zi))+(1−1)log(1−D(G(zi)))]BCE(D(G(zi)),1)第三行那个 ⇒ 可能是z一般取简单的均匀分布,直接离散化了。BCE是二元交叉熵 BCE(x,y)=−n1∑i=1n(ylogx+(1−y)log(1−x)).
优化辨别器(此时G时确定的,所以有一组生成的结果xˆ)就直接是基于那个 L(G,D) 之D:
LD=⇒=−(Ex∼pr(x)[logD(x)]+Exˆ∼pg(xˆ)[log(1−D(xˆ)]))−n1i=1∑n(logD(xi)+log(1−D(xˆi)))BCE(D(x),1)+BCE(D(xˆ),0)x∼pr(x)是在离散的数据集中均匀随机采样,生成的那组 xˆ 也做均匀采样假设…?
GAN 的诸多难题#
不稳定,难收敛#
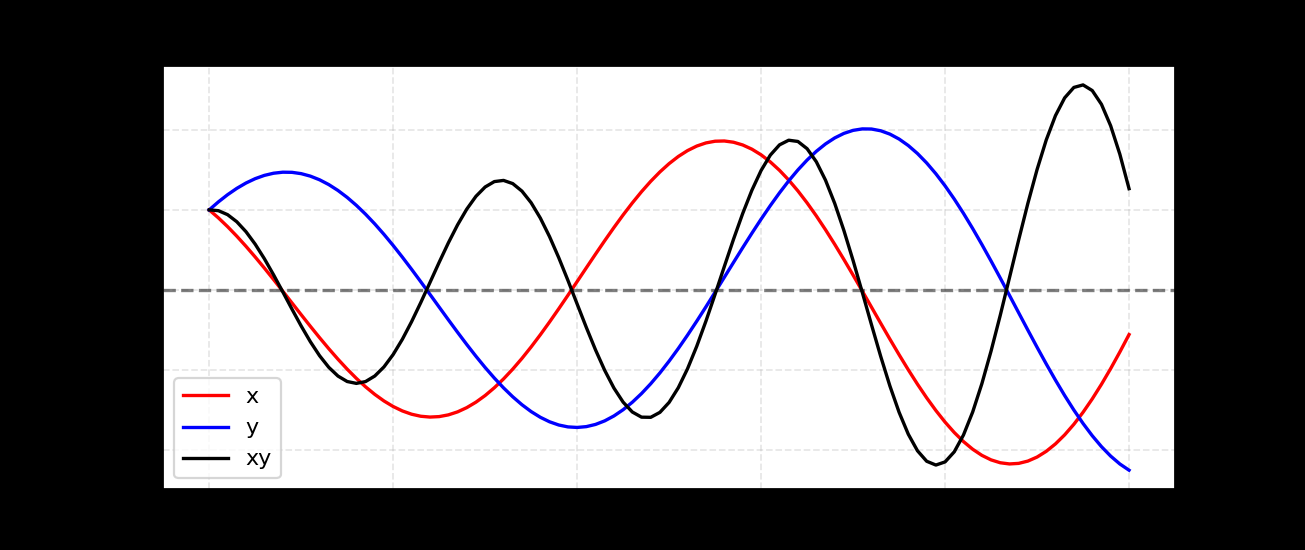
难训练是GAN的老大难问题。它是两个网络对抗式学习,想要收敛就需要达到一定程度的纳什均衡。而这非常困难。对GAN的训练情况做一点简化,假设两个方程f1,f2,模型x负责最小化 f1(x)=xy,模型y需要最小化 f2(y)=−xy(形成对抗)。
使用梯度下降去优化,∂x∂f1=y,∂y∂f2=−x,学习率都为 η,那么更新x=x−ηy,y=y+ηx,最后的结果大概会是这样震荡的情况,难以收敛:
低维Supports#
未弄懂,这节可以跳过。
这个东西很理论,我也没仔细了解。这里用到了流形(Manifold)和支持(Support)的概念,我还不太懂。理论来自TOWARDS PRINCIPLED METHODS FOR TRAINING GAN,非常理论。
| 术语 | 我也不懂的解释 |
|---|
| Manifold | 一个拓扑空间,在每个点附近都有接近欧拉空间的性质。如果是n维的就称为n维流形 |
| Support | 有一个实值函数f,它把定义域内的数映射到值域中,Support包含了定义域中所有没被映射到0的数 |
这个解释大概是不对的,我也不知道和后面的结论有什么关系,数学还是薄弱。(至少先看看wiki罢… manifold,support)。
认为 pr,pg 都是建立在一个低维的流形上的,这会导致instability。
实际数据集 pr 的维度可能被高估了,比如说,一张图片看似有几千万像素、几千万的维度,但实际上重要的只是个低维流形——“自由度”没有想象中的那么高——这实际上是流形学习的一个基本假设。
想象一些现实的图片,如果给定一个主题,比如猫、狗,那么画面内容就在很大程度上被限制了,有一个或多个对象主体,有两只眼睛一张嘴,猫猫狗狗的长相也相对接近一个style,这些限制导致图片并非有我们想象中的高自由度——并非每个像素都是自由的。
pg 也是基于一个低维流形的,这个就好理解,取决于那个随机采样的z,它的维度并不高,要知道一个64*64 的图片就有4096个点了!如果用100维的z取生成低至 64*64 的图片,这4096个点就要由一个100维的z去生成,z带来的可能性也许无法填满像素空间。
文章指出,既然pr,pg都基于低维的流形,低维的流形在高维空间中非常可能会脱节、完全不相交(想象两条直线在三维空间中,它远比三维空间中的两个平面更容易不相交),不相交时,理论上可以证明必定能找到一个辨别器 D,100%正确地区分真假数据。而一旦这个D 100% 正确了,就无法训练 G(梯度消失),那么这个网络就无法继续训练了。
梯度消失#
GAN的梯度消失问题更加严重。一个完美的辨别器 D,完全正确地辨别真假数据,那么损失函数 L(G,D) 的值就会是0,无法产生任何梯度。辨别器D越强,L越接近0,G就越会梯度消失。这使得GAN陷入了两难困境:要训练靠谱的G,D就必须也靠谱、也厉害;D一旦优化地强大了,G梯度消失无法训练了。
模式崩溃Mode collapse#
实际使用中,往往发现GAN容易倾向只生成很少数几类的图片,虽然它非常真实,也能骗过辨别器,但它只能生成这少数的几类,无法使用。生成器G容易陷入很狭窄的分布,难以学习复杂的真实世界多变化的数据。
什么时候停止训练?#
GAN没有什么客观的指标,G,D都只在各自的视角下往着欺骗对方的目的走,但G生成的结果是给人看的,什么时候训练好了?不知道。
提升GAN训练的Tricks#
Lil’log 总结自 Improved Techniques for training GAN, TOWARDS PRINCIPLED METHODS FOR TRAINING GAN。
Feature Matching#
不直接分辨真假数据本身,而是分辨真假数据的特征,优化目标为:
min∣Ex∼pr(x)f(x)−Ez∼pz(z)f(G(z))∣其中 f 用来算数据的特征,可以自行定义。这样D分辨的也不是数据本身,而是f(x), f(G(x)) 数据的特征。
Minibatch Discrimination#
以前一个minibatch里的数据是互相独立的,minibatch discrimination试图让GAN学习batch里数据之间的关系,我们估算batch里任意两对数据之间的相似度 c(xi,xj),然后把一个数据与其他所有数据的相似度加起来 o(xi)=∑jc(xi,xj),这成为数据 xi 的新特征,一起输入到辨别器中。
Historical Averaging#
对G,D,都往损失函数里加一个惩罚项:∣Θ−t1∑i=1tΘi∣,其中Θ是模型参数,而Θi 是前i次迭代的时候的模型参数。这个惩罚项可以防止模型一次更新太多,变化太剧烈。
(RNN中常用的clip_norm_,Gradient Penalty?)
One-sided Label Smoothing#
经验上,相比给辨别器0-1标签,给 0.9, 0.1 这样连续的平滑标签似乎能降低模型的敏感性。
Virtual Batch Normalization (VBN)#
在做batchnorm的时候,不根据自己minibatch的数据去做,而是用一个 fixed batch,或者说 reference batch 的数据去做。也就是说,全场用固定的 均值 和 标准差 做batchnorm,这个固定的均值和方差来自那个 reference batch,reference batch只在训练开始的时候选择一次。
加噪声#
因为 pr,pg 基于低维流形,使得容易优化出特别好的D,造成G的梯度消失,所以可以认为提升流形维度。一个做法是往 D 的输入中加噪声。
使用更好的分布相似性度量#
普通的GAN(前面一直说的那个 L(G,D))实际上是在减小 pr,pg 之间的JS散度,但是“当两个分部彻底不相交”的时候,这个度量没有意义。
于是有了用 Wasserstein metric(Wasserstein distance)替代 JS 散度。
Wasserstein GAN#
Wasserstein距离又称为Earth Mover’s distance, EM距离,它的定义是要把 分布 P和分布Q 的形状通过移动概率密度函数中的值变为一样,最小要移动多少。也就是说,要对P和Q的概率密度函数加加减减多少数,并且乘以这些数在横坐标之间的移动距离,才能把他俩的概率密度函数变为一样。(让我想到了编辑距离:))。
为了便于理解,先用个离散的例子:P, Q 两列物品,每列4个堆,每堆里有不同数量的物品(每列的物品总数一样),可以在同列的堆之间转移物品,要把P列和Q列的物品分布变得完全一样,假设 f(i,j) 表示从位置i移动了多少物体到位置j,求任意方案下所能达到的最小的 ∑∣f(i,j)(i−j)∣。注意考虑移动距离!
一种方案是每次让第 i 堆相同,往第 i+1 堆移动物品:
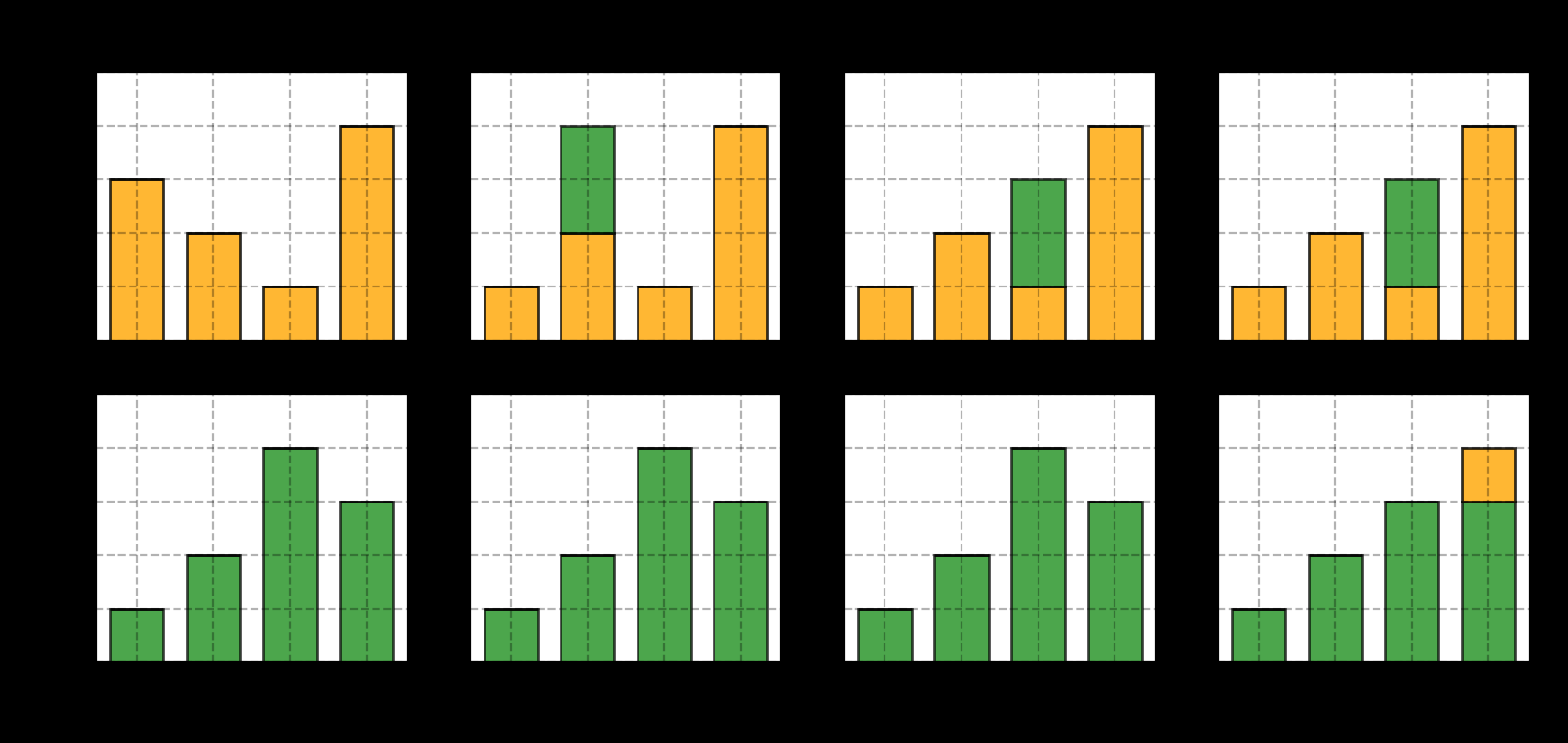
每步移动 0, 2, 2, 1 个方块,EM距离就是 5. 当然,这个简单的例子中没有考虑求最优。
连续情况下,Wasserstein距离定义为:
W(pr,pg)=γ∼∏(pr,pg)infE(x,y)∼γ∣x−y∣其中 inf 表示最大下界(infimum,回去复习数分Orz)(即所有可能的方案中最小的那种),∏(pr,pg) 是 pr,pg 两者所可能组成的所有联合分布(其实就是遍历所有可能的移动方案),(x,y) 是一对横坐标,γ(x,y) 比较“曲折”,以x为起始, y为目标,表明在γ这个方案下要从pr 的 x 位置拿多少数放到 y 位置上,从而让 pr 在 x或y 位置上与 pg 的 x或y 位置相同,有 ∑xγ(x,y)=pg(y),∑yγ(x,y)=pr(x)。
对于某个方案 γ,EM距离为:
(x,y)∑γ(x,y)∣x−y∣=E(x,y)∼γ[∣x−y∣]为什么Wasserstein距离更好#
前文提到,JS 散度的问题在于,当两个流形不相交的时候,无法给出平滑的结果,但Wasserstein距离可以。构造一个例子(流形P, Q)来解释这一现象:
∀(x,y)∈P∀(x,y)∈Q,x=0,y∼U(0,1),x=θ(0≤θ≤1),y∼U(0,1)这样当 θ=0的时候,两个流形就完全不相交。在相交和不相交的情况下计算PQ的KL散度、JS散度、Wasserstein距离:
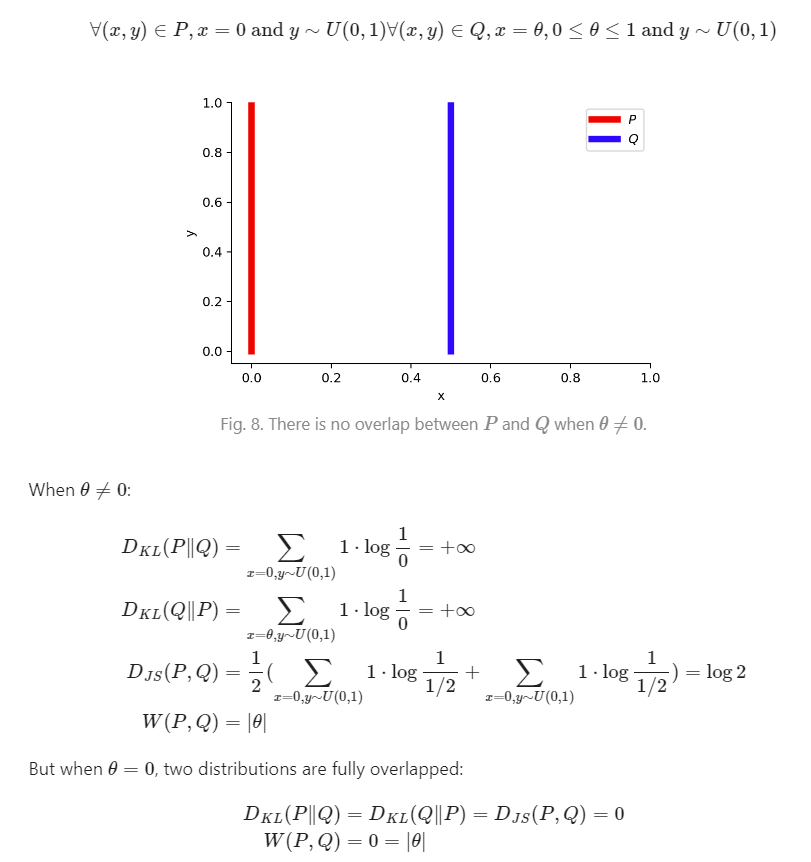
可以看到,不相交的时候 KL 散度直接无穷,JS 散度发生了跳变(θ变为0的时候),而Wasserstein距离则是平滑的。
把Wasserstein距离用到GAN中#
Wasserstein本身是一个最优化问题,很难直接求解。用了Kantorovich-Rubinstein对偶条件将它进行转换(好像在什么地方看到过,这个对偶,最优化..? 这个转变比较复杂,关于这个K-R对偶和Wasserstein距离的变换,WengLilian推荐了一个awsome post,之后有兴趣可以看看):
W(pr,pg)=K1∣∣f∣∣L≤KsupEx∼pr(x)[f(x)]−Ex∼pg(x)[f(x)]其中 f 是一个函数,它需要满足 ∣f∣L≤K,也就是满足 K-Lipschitz continuous (K利普希茨连续,回去复习数分…Orz)。具体就是:
∀x1,x2∈R,∣f(x1)−f(x2)∣≤K∣x1−x2∣但是注意,一个利普希茨连续的函数未必处处可微,比如 f(x)=∣x∣。
这个 f 函数是学习出来的。在使用了 Wasserstein距离的 W-GAN 中,“辨别器”就是要学习这个 f 函数,记为 {fw}w∈W,这是一个派生自 K-利普希茨连续函数集合 的函数,用参数 w 去控制,“辨别器”的优化目标就变成了:
L(pr,pg)=W(pr,pg)=w∈WmaxEx∼pr(x)[fw(x)]−Ez∼pg(z)[fw(gθ(z))]可以看出,WGAN 中的“辨别器”虽然仍叫辨别器,形式上很相似,但已经有了截然不同的数学身份了。
另一个问题是如何保证迭代过程中 fw 始终有 K-利普希茨连续性?方法很简单粗暴但也很有效,每次更新fw 后都把参数 w 截断到一个小范围,比如 [-0.01, 0.01],从而直接保证fw不会比原本“大太多”,维持利普希茨连续性。——当然,原作者自己也说这种方式很terrible。
G的优化目标也没什么变化:
θmaxEz∼pz(z)[fw(gθ(z))]WGAN的伪代码为:
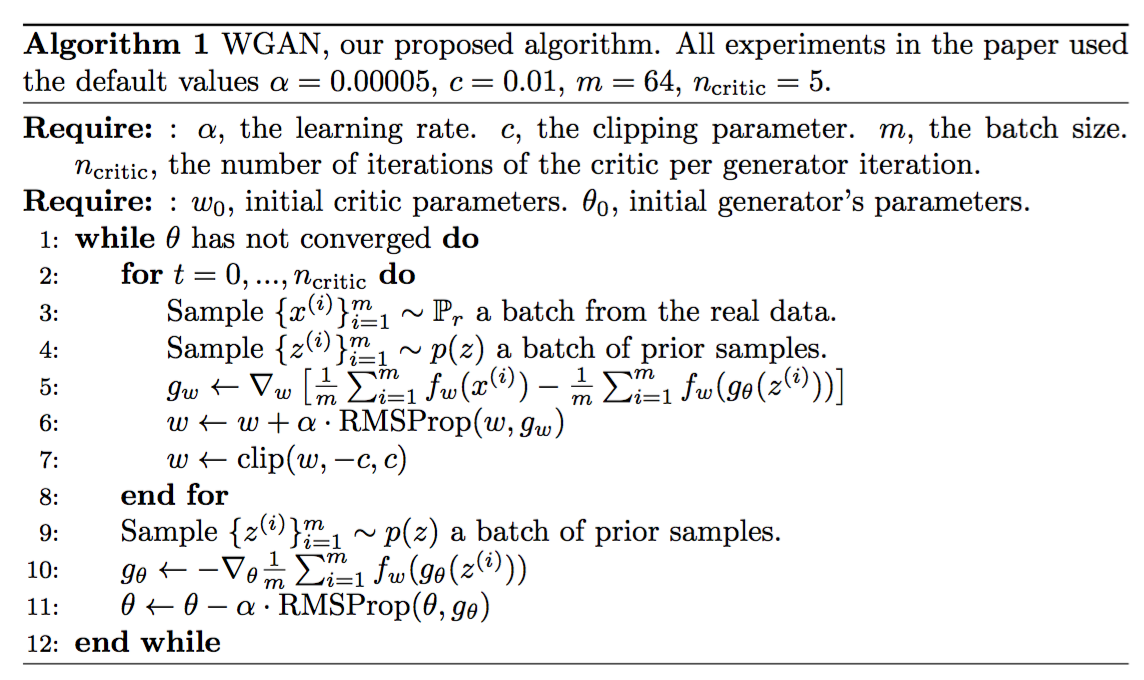
然而,WGAN虽然理论上有比较精彩的推导,但仍然有不稳定、难收敛、梯度消失的问题…关于 w 的权重clip,后面更普遍用的是 gradient penalty。