
CAUTION强化学习理论比较复杂,我是边看边瞎琢磨边记,有时候看到后面(或者过几天)发现前面想的不太对,就有了一些补丁性质的句子(或者干脆没改),谨慎阅读…
DQN (Deep Q-Learning) 是将深度神经网络引入强化学习的最早的工作(或者至少是最早取得比较可靠的结果的工作),Google DeepMind 用它发表了一篇 2013 年的 NPIS(Playing Atari with Deep Reinforcement Learning)、一篇 2015 年的 Nature(Human-level control through deep reinforcement learning)。这两篇都是DQN并且没有明显差别,后者把前者中没有明说的一些问题说清楚了些。
此后DQN出现了很多改进,包括DDQN(Double DQN)等,包括后来OpenAI的DDPG Agent 也明确表示是从 DQN 改进来的。
DQN
从整体上来说,DQN完全使用了Q-Learning的框架,它的“Deep”在于将卷积神经网络用来拟合 状态-动作 Q函数,从而使Q函数能够直接接收图像等高维的状态作为输入、而不依赖人工标注了。
此前已经有试图使用线性函数或者MLP去估计Q函数,但是这些方法都非常不稳定。文章总结了将深度学习(有监督学习)引入强化学习的困难与水土不服之处:
- 深度学习往往需要大量人工标注过的数据集,类比地把深度学习模型的判断当做action,用它与标注的差异当做reward,这个reward是比较固定、即时的、清晰的。而强化学习同样需要从reward函数来学习,它往往是稀疏的、有噪声的、有延时的。对于“延时”,我的理解是,一个action对环境造成的影响,可能要在很多时间步之后才会体现出来,而只在当时显现出一个“不痛不痒”的中性结果。
- 深度学习中,往往假设采样得到的数据是独立同分布的,但是强化学习中,数据(状态、动作、奖励序列)相互之间是强相关的,而且随着强化学习agent学习到了新的策略,那么数据的分布也一定会随之变化。
将系统每个时刻的状态表示为 ,这样每个状态都包含了前面的所有环境条件与当时采取的动作,包含了影响环境与结果的所有信息,这个状态的表示确实能把系统变成一个马尔科夫决策(MDP),每个状态只与上一个状态有关。但实际使用的时候当然并不真的用这个作为状态表示,而只能从中拿出几个 x,也不会包括 a,这实际上打破了马尔科夫性。不过我们依然当做它有来简化而已。
DQN主要解决了两个问题:
- 使用CNN来作为对Q函数的估计,这样可以直接端到端地处理图像等高维信息了。
- Experience Replay 机制来让深度强化学习真正稳定下来。
用CNN估计Q
Update 1122
下面,以及后面一两篇文章里的,损失函数是让拟合函数Q具有Bellman等式的性质,是我”望文生义“直观感觉来的。实际上,从数学上来看,QLearning的更新式就是:
而下面的Loss: ,求一次导之后,括号里面那个就出来了,这不就是上面Qlearning更新式子中的增量部分吗?不过乘以了一个系数 - Q本身对的梯度。
用函数估计Q是在连续状态或连续动作下的常用做法。这里用CNN来估计Q使得能够处理图像等高维数据,即 。
如何确定一个CNN真的拟合了一个Q函数?做法是:如果这个CNN有Q函数的某些性质,就认为成功拟合了。这个性质就是 Bellman等式。Q使用 折扣累积函数,这里的Bellman等式采用最优形式:
其中
而对于CNN表示的 Q,参数为 ,另(s, a, s’)的情况下的 ,最优化的目标是让这个 Q 具有 Bellman 等式的性质,应该最小化y和的差距,即损失函数为: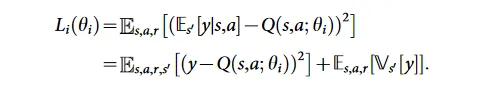
这里 和 的差别为,前者专门用来计算Q(s’, a’)——即基于策略的预估;后者则用来计算当前状态-行为,即考虑当前真正反馈来的奖励。这是两个相同结构的网络,每步只更新 ,每 C 步将 复制到 。用上面的损失函数做梯度下降的时候,只对 求导。
在论文中, 参数的网络称作 target 网络,而 的网络称作 online 网络。

当然实际上,Q也不直接以为输入,而是以 为输入, 是一个和图像帧有关的预处理函数,具体看下面。
此处省略具体这个 Q 是什么样。只是一个简单的CNN,连着一个全连接层和全连接输出层。
Experience Replay
对于每个系统状态 st(此时的帧为),在这个状态下采取某个行动 a,得到奖励 r,以及下一个帧 。。这样的“状态” s 并上当时的reward 被称为一次经验。每步都会将经验存储到D,而更新Q的时候不直接拿最新的执行结果做更新,而是从D中随机抽取出一个或一批来,用它们做更新。
实际上,无法真的存下每个与r,第t步真正保存下来的经验是:。 是一个预处理函数,将帧降采样到一半分辨率,然后将游戏画面crop下来,最后将这样处理后的几帧压成一个四维数组。可见,符合马尔科夫决策的状态定义 实际使用的时候同样只使用了靠近的几帧。
这个做法有以下好处:
- 相邻步骤的执行之间的数据状态转移具有很强的相关性,如果直接用当前步骤去更新,就会导致重复这些强相关的更新,不划算。而从之前的经验中随机采样可以打破这样的相关性。
- 总是在连续的当前步骤上数据去更新的话,t步的行为会显著地影响t+1步时的数据分布,如果直接用会导致严重的不稳定。experience replay 通过随机化的方法弱化了这些分布的差异。
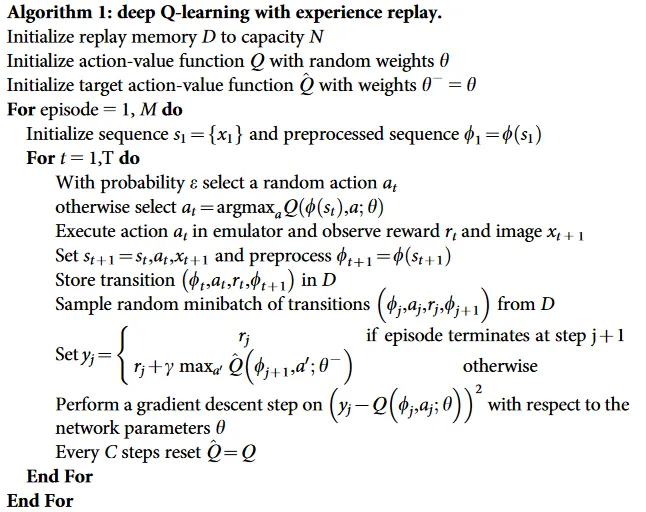
DQN伪代码
最后给出DQN的伪代码:
Double DQN
同样来自 Google DeepMind,是2015年的一篇文章,几乎完全就是DQN,只做了一点点改动。这个改动来自于一个早已被认可的如下所述的结论。Q-Learning框架中,给一个Q函数,估计它的公式是:
这个式子很容易从意义上去理解。注意里面那个 ,这是在执行“选择步骤”,而外面那个 是在执行 “评估”步骤,更清楚地说,把这个式子写成等价的形式:
这样将选择和评估区分,里面的Q是在选择 状态下应该使用什么行为,而外面的 Q 是在这一选择下评估累积奖励。同时用同一个估计函数Q来执行选择和评估,会导致学习到的 Q 做出过大的估计,即overestimated,高估一个行为所能带来的收益。
早先的结论是,这个高估有上限:,其中 是:估计函数 Q(x, a) 与理论最优估计函数 Q*(x, a) 的误差位于 的平均分布,m 是所有动作的种类数。
本文证明了对于所有类型的估计函数、包括用状态-动作表来穷举表示的(tabular setting) Q函数都有这样的高估倾向,因为这个高估有 下界,是 ,C是一个正数。这个下界是紧凑的(可以取到)。
虽然随着动作数 m 增加这个下界不断减少,但达到它非常困难,一般的情况是,使用不加改进的 Qlearning 的方法,随着动作数量增加,偏差越来越大。
证明在后面补。
值得注意的是,高估未必是有害的。如果大家高的都一样,那就没有影响;如果只是应该最高的更高了,那反而有利。当然实际情况是,Q-Learning带来的高估往往会降低稳定性,一般有害。
Double Q-Learning
而有一种办法缓解上面的 overestimation,也就是将选择行为用的Q和估计奖励用的Q分开来。使用连组参数 来分别用于选择行为和估计奖励,也就是把 Qlearning 的估计函数变为:
这个式子里,里面那个做选择用的Q是以 为参数,而外面的用于评估的是以 为参数。
为了公平,他们俩在使用的时候定期互换身份。
Double DQN
只用对DQN做非常小的改动就可以实现上面的 Double 思路。DQN天然有一个参数为 的 target 网络,一个参数为 的 online 网络。——它采用这两个网络,我觉得一开始也是想到了这个高估问题。只需要对 DQN 的估计函数稍作修改:
而损失函数不变。(原本的DQN中,这个式子里的a也是用 模型选择出来的)。
此外,DQN有定期把 复制给 的操作,这里直接用来代替了原始 Double 方法的 互换 操作。
最后 Double DQN 一般能取得更好更稳定的效果,但也有例外,因为overestimation也可能是有利的。
高估下界的证明
假设一个最优的Q函数 ,假设一个期望值 相等的估计 ,有 ,但每一项都不完全相等,,其中 是一个正数, 表示一共有这么多个 action。
需要证明:.
令 ,假设:。
让 中为非负的集合为 ,数量为 n;而其中负数的集合为 ,数量为 m-n。如果 n=m,又有 ,一定有 ,全部等于0,这和 矛盾,所以一定有 。
继而有:。而正项和与负项和加起来为0,也就有 ,这个式子也表明 。
接下来使用平方和为正的约束做文章。平方和可以分成负项平方和加上正项平方和。
而与约束 矛盾!
所以
带优先级的 replay
前面在 Replay Memory 中采样来进行训练(experience replay)是随机采样的。一个很简单的想法是,如果不随机采样可能能加速学习。比如,replay memory 中有一些时间步是“无用”的,不是关键的,那么将它的优先级设置到更低就很自然了。
于是就有了带优先级的 experience replay,这个简单的想法很大程度上提高的学习速度,文章 PRIORITIZED EXPERIENCE REPLAY
TD-error based
TD及时间差分,TD-Error 就是DQN中的损失函数,不过没有平方:![]()
注意这个差就是 DQN 损失函数梯度中的一部分。
从更新式来看,TD-error越大,这个experience带来的更新就更大,也可以认为向最优的走了一大步。所以可以每次都选用TD-error最大的experience 来训练。
问题
总是在很小一部分的experience上训练,过拟合,不稳定。
Stochastic: Randomization
避免上面的为题,还是加入随机部分。将experience 按照 TD-error 降序排序,每个都有自己的 rank,然后每个experience被选择的概率是:
其中 是动态调整的超参数,而 。文章还提出了其它的 ,但这种比较鲁棒。
这样即使是最小 TD-error 的也有机会被选中。由于 P(i) 是只余位次有关而与 experience 本身无关,所以可以提前计算。
Anneal unbias
依然会不可避免地更多尝试 TD-error 大的experience,而随着更新,采样的分布是不一样的(对于每个experience而言),这会带来bias。文章通过 在以此优先级方法采样experience来进行更新的时候 施加衰减来解决这个问题。它称为重要性采样 ,但因为最后直接在 参数更新的步骤加了衰减,所以是所谓“权重重要性采样”,而不是通常意义的重要性采样。
N 是 memory 中 experience 的总数, 是动态调节的超参数。最后,在更新的时候,将更新量乘以 来施加一个衰减。
如果 ,上面这个权重使得,每次更新的值的期望大致就是 完全随机采样时 的期望(重要性采样)。
关于超参数
在训练过程中,将这两个参数从初始值 逐渐变化到1。也算是一个逐渐逼近的过程;训练到后来见地越多,越不轻易地相信TD-error最大的那个。开始的时候,是为了加快速度。
伪代码
注意,第 11 行计算 TD-error,第 8 行的 for 1…k 是batch,第13行计算梯度并衰减。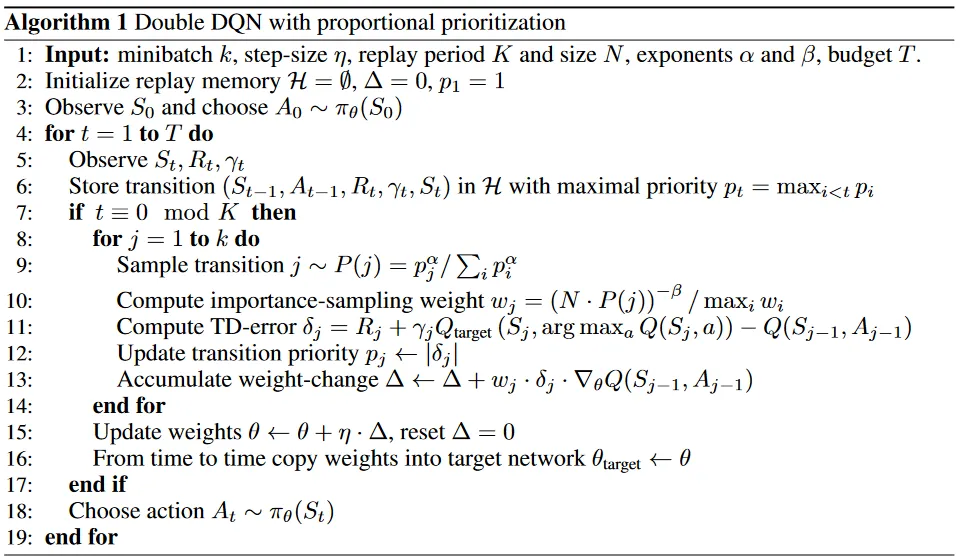
实现
几乎完全就是DQN或者DDQN的实现,只是多了个权重的计算和采样。权重的计算按照上面的公式来即可,权重的采样需要一点讨论:如何高效地按权重进行采样?
思路非常简单原始:令所有项的权重和为S,均匀随机生成一个 0~S-1 的数,然后看这个数落在哪个项的区间。直接应用会是O(n)的时间界。可以使用一个线段树的数据结构加速到 O(log n)。
让replay buffer中的所有项为线段树的叶子,每个叶子有自己的权重,自底向上,每个中间结点的值为其两个儿子结点的权重和。可见根节点是所有叶子结点的权重和。
均匀采样一个 0~S-1 的数,从根节点开始判断,如果这个数小于等于左二子的值,就直接进入左子树递归地继续判断;否则,减去左儿子的值,进入右子树递归判断,最后到叶子结点,就是采样到的项。
Dueling DQN
同样是DDQN,只是在作为评估函数的神经网络上做了点修改,多加了一个分支: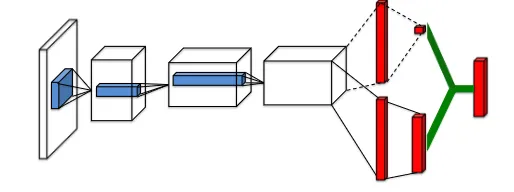
第一个分支计算 V(s),即值函数,是一个标量;第二个分支计算 Advantage函数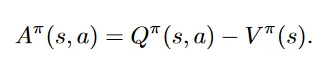
似乎是在试图得到“只和 a 有关的”奖励值…
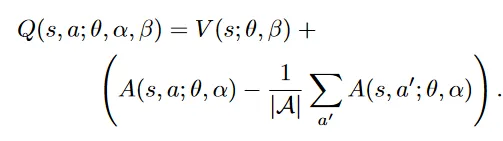
这个网络仍旧作为对Q函数的估计,最后一层将两个分支融合:
其中 分别是两个分支的参数。这是对V广播后向量加。
直接加得到的结果很不稳定,因为网络无法区分两个部分,并且也不是对Q函数的正确近似,因为各个分支 V, A不是V、A本身,而是(可能很不准的)估计。
为了让这个网络成为合理的Q函数,开始了修修补补: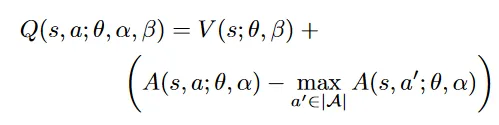
首先使用了max操作,这样Q中最大的一定是那个V分支的值。这个网络就更像一个Q了;具体有什么道理,我也说不清。
后来发现,用平均而不是最大更稳定平滑: